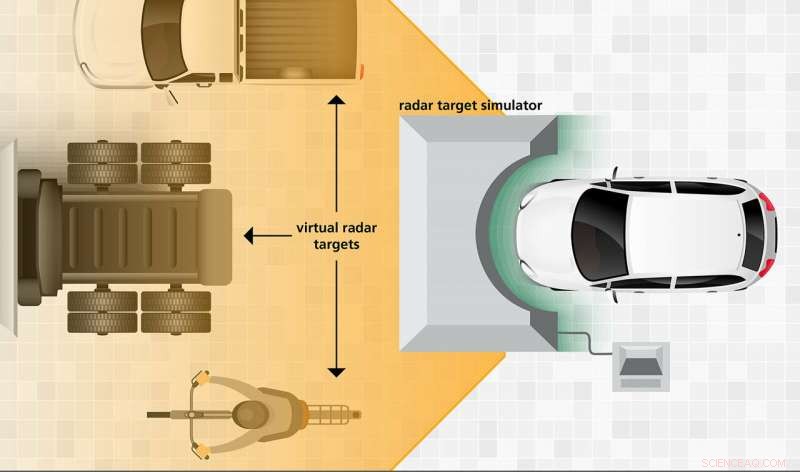
Ilustração do simulador de alvo radar ATRIUM. Crédito:Fraunhofer FHR
Sensores em veículos autônomos devem ser extremamente confiáveis, já que no futuro os motoristas não monitorarão mais constantemente o tráfego durante o trajeto. No passado, esses sensores foram submetidos a árduos testes de estrada. O novo dispositivo de teste ATRIUM do Instituto Fraunhofer de Física de Alta Frequência e Técnicas de Radar FHR agora torna possível mover uma grande parte desses testes de estrada para o laboratório. ATRIUM dá um show para o sensor de radar do veículo, gerando um cenário artificial que se aproxima muito das condições reais encontradas no tráfego das ruas.
O carro de amanhã dirigirá sozinho. Os passageiros se moverão pela estrada como se fossem conduzidos por um motorista particular enquanto conversam, lendo um jornal ou talvez assistindo um vídeo. Embora os sistemas de assistência ao motorista, como o controle automático de distância, não sejam mais novos no mercado, ainda levará vários anos até que carros completamente autônomos tomem as ruas. Isso ocorre porque a tecnologia envolvida deve ser absolutamente confiável. Os sensores são o fator decisivo aqui:por exemplo, os sensores de radar de hoje já são capazes de detectar obstáculos de forma independente e aplicar os freios em caso de perigo. Esses e outros sensores são rigorosamente testados antes de serem instalados no carro. E os veículos autônomos exigem um nível ainda mais alto de confiabilidade, pois se o motorista não estiver mais ao volante, o fabricante do veículo pode ser o responsável final por evitar um acidente.
É por isso que os fabricantes de automóveis têm demandas relativamente altas no que diz respeito à confiabilidade do sensor. Eles exigem sensores que não causem mais do que um único erro em distâncias de condução de vários milhões de quilômetros, o que significa que os carros de hoje muitas vezes precisam passar por longos testes de estrada. "São muitos quilômetros, "diz o Dr.-Ing. Thomas Dallmann, Líder do Grupo de Pesquisa Aachen no Instituto Fraunhofer de Física de Alta Frequência e Técnicas de Radar FHR. "Além disso, vários sensores devem ser testados para provar estatisticamente sua confiabilidade. Isso significa que vários veículos de teste com sensores precisam passar muito tempo na estrada. "Outra dificuldade:se ocorrer um erro após vários milhares de quilômetros, o sensor deve ser otimizado e os testes de estrada devem começar tudo de novo, um processo extremamente demorado.
Movendo os testes de estrada para o laboratório
Para simplificar esta situação, tentativas estão sendo feitas para simular a realidade e trazer os testes de estrada para o laboratório. Esse tipo de teste de laboratório já existe para sensores de radar. Os sensores de radar emitem um sinal de rádio que é refletido por vários objetos. Com base no eco, sistemas de sensores eletrônicos podem então analisar os arredores, medir a distância aos objetos detectados e a velocidade com que eles se movem.

Versão de canal único do simulador de alvo radar ATRIUM. Crédito:Fraunhofer FHR
Esse princípio já foi simulado em laboratório usando os chamados simuladores de alvo de radar. Esses simuladores coletam as ondas de radar emitidas pelo radar do veículo e modificam o sinal do radar para se comportar como se tivesse encontrado objetos. O simulador então retorna as informações para o carro na forma de uma imagem de eco artificial. Assim, o simulador de alvo de radar gera uma paisagem simulada para o radar do veículo. A vantagem é óbvia:o equipamento de teste com um radar de carro e um simulador de alvo de radar pode ser executado no laboratório dia e noite, sem ter que colocar o carro na rua.
Infelizmente, os poucos simuladores de alvo de radar disponíveis no mercado hoje estão longe de ser capazes de gerar uma paisagem de eco completa. “A maioria dos modelos só consegue gerar uma imagem altamente restrita com um número de reflexos de um dígito retornado ao radar do carro, "diz Dallmann." É um número extremamente pequeno em comparação com a situação em um ambiente natural. " o cenário real contém centenas de objetos refletivos:pessoas, carros, árvores, sinais de trânsito. Mesmo um único veículo no trânsito pode gerar vários reflexos de diferentes ângulos, por exemplo, um carro de passageiros cujos pára-choques, rodas e espelhos retrovisores laterais refletem de forma diferente. "Ainda estamos muito distantes de um cenário realista quando se trata de testar sensores para direção autônoma, "continua o engenheiro.
O simulador de alvo de radar gera até 300 reflexos
É por isso que Dallmann e sua equipe estão desenvolvendo um novo, simulador de alvo de radar de alto desempenho chamado ATRIUM (a sigla em alemão para "Ambiente de teste automotivo para testes e medições de radar in-the-loop"), capaz de gerar objetos significativamente mais refletivos. O objetivo atual do Fraunhofer FHR é ser capaz de gerar 300 reflexos até o final do projeto, um objetivo tremendo. "Isso significa que o ATRIUM pode apresentar ao sensor de radar do carro uma cena relativamente realista, algo como um filme drive-in para o sensor de radar. "
Desde que um pedido de patente foi apresentado para a tecnologia ATRIUM, Thomas Dallmann ainda não pode revelar detalhes. Mas ele pode dizer:“Otimizamos a estrutura dos canais de transmissão, tornando-os muito mais econômicos. Como resultado, os reflexos podem ser representados de forma que cheguem ao radar de várias direções diferentes. "Isso poderia possibilitar o teste de novos sensores para veículos autônomos em todo o escopo e sob condições altamente realistas no laboratório." No futuro , poderemos executar testes altamente complexos, o que tornará possível grandemente
reduzir o tempo envolvido em testes de estrada. "Dallmann e seus colegas apresentarão as instalações de teste de laboratório com radar de veículos e o simulador de alvo radar ATRIUM na Automotive Testing Expo em Stuttgart, de 21 a 23 de maio.