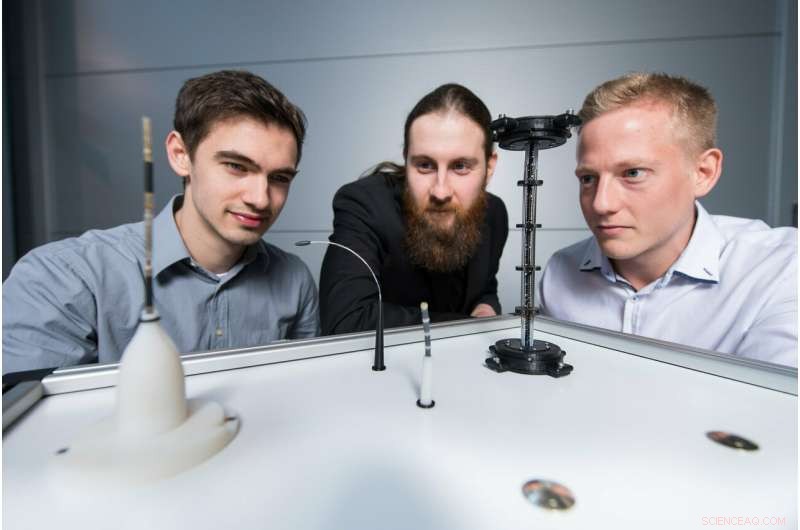
 p Dominik Scholtes (L.), Rouven Britz e Yannik Goergen (r.), alunos de doutorado da equipe do professor Seelecke, com protótipos dos braços flexíveis do robô. Crédito:Oliver Dietze
p Dominik Scholtes (L.), Rouven Britz e Yannik Goergen (r.), alunos de doutorado da equipe do professor Seelecke, com protótipos dos braços flexíveis do robô. Crédito:Oliver Dietze
p Ao contrário dos braços convencionais do robô com articulações articuladas e giratórias, Os novos braços flexíveis que estão sendo desenvolvidos pelo professor Stefan Seelecke e seu grupo de pesquisa na Saarland University são construídos com músculos feitos de fios com memória de forma que têm a capacidade de se dobrar em quase todas as direções e se enrolar nos cantos. p Os braços flexíveis são movidos eletricamente e, portanto, podem funcionar sem o equipamento pneumático usual ou outros acessórios volumosos. Como a própria liga com memória de forma tem propriedades de sensor, os braços podem ser controlados sem a necessidade de sensores adicionais. A nova tecnologia pode ser usada para construir grandes braços robóticos com a flexibilidade da tromba de um elefante ou tentáculos ultrafinos para uso em operações endoscópicas.
p De 1 a 5 de abril, a equipe de pesquisa estará em Hannover Messe, onde usarão protótipos para demonstrar as capacidades dos braços de memória de forma no Estande de Pesquisa e Inovação de Saarland. A equipe da Seelecke está procurando parceiros interessados em desenvolver a tecnologia para aplicações práticas.
p Existem limites funcionais para a flexibilidade dos braços humanos e robóticos. As articulações geralmente são volumosas e conectam ossos rígidos ou conjuntos mecânicos. O movimento é normalmente restrito a certas direções espaciais. Em contraste, a tromba de um elefante e os tentáculos do polvo oferecem muito mais agilidade. A presença de dezenas de milhares de músculos permite que essas criaturas movam o tronco ou tentáculo em todas as direções, dobrá-lo no grau certo e segurar as coisas com grande poder. Os engenheiros da Saarland University se inspiraram nesses modelos naturais e estão desenvolvendo braços robóticos que eliminam a necessidade de articulações ou esqueletos rígidos ou estruturas, criando estruturas que são leves e extremamente flexíveis.
p O professor Stefan Seelecke e sua equipe estão colaborando com pesquisadores da Darmstadt Technical University para desenvolver thin, tentáculos artificiais precisamente controlados. No futuro, o sistema pode ser utilizado como fio-guia em cirurgia cardíaca ou como endoscópio em procedimentos gastroscópicos e colonoscópicos. Os pesquisadores estão, portanto, equipando os tentáculos artificiais com funções adicionais, como uma pinça ou uma ponta com rigidez ajustável que oferece uma força de empuxo aprimorada. Mas a tecnologia também pode ser ampliada para produzir grandes braços robóticos não muito diferentes da tromba de um elefante.
p A flexibilidade desses novos braços robóticos vem dos músculos artificiais usados pela equipe de pesquisa de Saarbrücken. Esses músculos são compostos por fios ultrafinos de níquel-titânio (nitinol) que se contraem e se alongam de maneira controlada. Os fios de nitinol ultrafinos se contraem como músculos reais, dependendo se uma corrente elétrica está fluindo ou não.
p "O níquel-titânio é conhecido como liga com memória de forma, o que significa que ele é capaz de retornar à sua forma original após ser deformado. Se uma corrente elétrica flui através de um fio de nitinol, o material esquenta, fazendo com que ele adote uma estrutura cristalina diferente com o resultado que o fio se torne mais curto. Se a corrente estiver desligada, o fio esfria e se alonga novamente, "explica o professor Seelecke.
p Sua equipe do Intelligent Material Systems Lab da Saarland University criou feixes desses fios que agem como fibras musculares artificiais. "Vários fios ultrafinos fornecem uma grande área de superfície através da qual podem transferir calor, o que significa que eles se contraem mais rapidamente. Os fios têm a densidade de energia mais alta de todos os mecanismos de acionamento conhecidos. E eles podem exercer uma força de tração muito alta em uma curta distância, "explica Seelecke, que também conduz pesquisas no ZeMA - o Centro de Tecnologia de Mecatrônica e Automação em Saarbrücken. A equipe de pesquisa da ZeMA está desenvolvendo uma gama de aplicações para esses fios, de novos sistemas de refrigeração a novos tipos de válvulas e bombas.
p Para os braços do robô, os pesquisadores ligam os feixes de fios para que atuem como músculos flexores ou extensores, que, trabalhando em concerto, produzir um movimento fluido. "Os tentáculos que poderiam ser usados no futuro como cateteres médicos ou em procedimentos endoscópicos têm diâmetros de apenas cerca de 300 a 400 micrômetros. Nenhum outro sistema de acionamento é de tamanho comparável. Os sistemas anteriores usados para procedimentos de cateter eram significativamente maiores e isso tendia a limitar suas capacidades, "explica Paul Motzki, que escreveu sua tese de doutorado sobre os fios da memória de forma e é assistente de pesquisa no grupo do professor Seelecke.
p Os novos tentáculos podem ser controlados com muita precisão e podem ser usados para criar ferramentas multifuncionais. Por exemplo, a ponta distal do tentáculo pode ser feita para realizar um movimento de empurrar. O padrão exato de movimento necessário é modelado pelos pesquisadores e então programado em um chip semicondutor. E o sistema não precisa de outros sensores. Os próprios fios fornecem todos os dados necessários. "O material do qual os fios são feitos tem propriedades sensoriais. A unidade controladora é capaz de interpretar os dados de resistência elétrica para saber a posição exata e a orientação dos fios a qualquer momento, "diz Paul Motzki.
p Ao contrário dos braços robóticos convencionais que requerem energia de um motor elétrico ou de um sistema pneumático ou hidráulico, os braços não precisam de nenhum equipamento pesado, apenas corrente elétrica. "Isso torna o sistema leve, altamente adaptável e silencioso para operar, e isso significa que os custos de produção são relativamente baixos, "diz o professor Seelecke. A equipe de pesquisa exibirá seus protótipos de sistema em Hannover Messe e demonstrará o potencial desses novos braços robóticos contínuos.