Crédito:Massachusetts Institute of Technology
50 anos atrás, o primeiro braço de robô industrial chamado Unimate montou um café da manhã simples de torradas, café, e champanhe. Embora possa ter parecido uma façanha perfeita, cada movimento e colocação foram codificados com consideração cuidadosa.
Mesmo com os robôs mais inteligentes e adaptáveis de hoje, esta tarefa continua difícil para máquinas com mãos rígidas. Eles tendem a funcionar apenas em ambientes estruturados com formas e locais predefinidos, e normalmente não consegue lidar com as incertezas na localização ou forma.
Nos últimos anos, no entanto, os roboticistas resolveram esse problema criando dedos macios, flexível, materiais como borracha. Essa flexibilidade permite que esses robôs suaves pegem qualquer coisa, de uvas a caixas e garrafas de água vazias, mas ainda não conseguem lidar com itens grandes ou pesados.
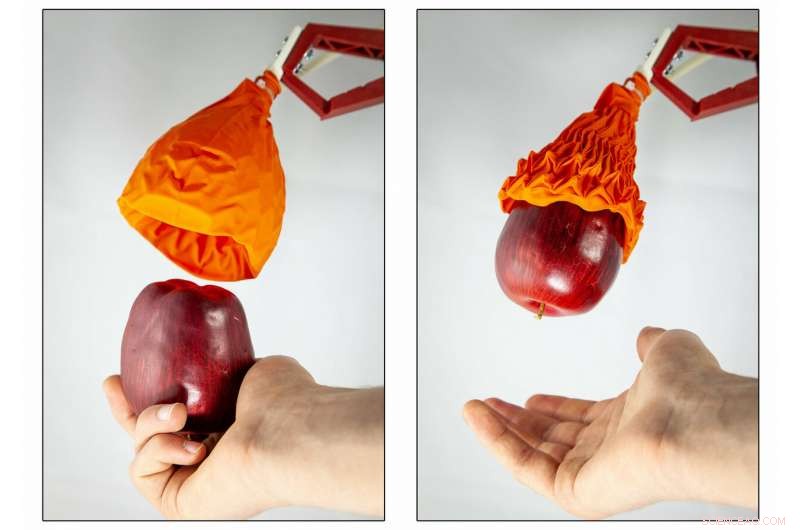
Para dar a esses robôs soft um pouco de ajuda, pesquisadores do MIT e de Harvard desenvolveram uma nova garra que é macia e forte:uma estrutura de origami em forma de cone que colapsa sobre os objetos, muito parecido com uma armadilha de Vênus, para pegar itens com até 100 vezes seu peso. Este movimento permite que a pinça segure uma gama muito maior de objetos - como latas de sopa, martelos, taças de vinho, drones, e até mesmo um único florete de brócolis.
"Uma das minhas ideias lunares é criar um robô que pode embalar automaticamente mantimentos para você, "diz a professora do MIT Daniela Rus, diretor do Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL), e um dos autores seniores de um novo artigo sobre o projeto.
"Abordagens anteriores para o problema de embalagem só podiam lidar com classes muito limitadas de objetos - objetos que são muito leves ou objetos que se adaptam a formas como caixas e cilindros, mas com o sistema de garras Magic Ball, mostramos que podemos fazer tarefas de pick-and-place para uma grande variedade de itens, desde garrafas de vinho a brócolis, uvas e ovos, "diz Rus." Em outras palavras, objetos pesados e objetos leves. Objetos delicados, ou resistente, ou que tenham formas regulares ou livres. "
O projeto é um dos vários nos últimos anos em que os pesquisadores pensam de maneira inovadora com o design de robôs. Garras em forma de bola, por exemplo, pode lidar com uma gama maior de objetos do que os dedos, mas ainda tem o problema de ângulos limitados. Dedos robóticos mais suaves normalmente usam ar comprimido, mas não são fortes o suficiente para pegar objetos mais pesados.
A estrutura desta nova garra, Enquanto isso, assume uma forma totalmente diferente. Em forma de cone, oco, e movido a vácuo, o dispositivo foi inspirado na "bola mágica de origami" e pode envolver um objeto inteiro e pegá-lo com sucesso.
A garra tem três partes:a estrutura do esqueleto baseada em origami, a pele hermética para envolver a estrutura, e o conector. A equipe o criou usando um molde mecânico de borracha e um plástico especial termorretrátil que se auto-dobra em altas temperaturas.
O esqueleto da bola mágica é coberto por um balão de borracha ou uma fina folha de tecido, não muito diferente da pesquisa anterior da equipe sobre músculos artificiais inspirados em origami movidos a fluidos (FOAM), que consistia em uma pele hermética envolvendo um esqueleto dobrável e fluido.
A equipe usou a garra com um robô padrão para testar sua força em diferentes objetos. A garra pode agarrar e levantar objetos com 70 por cento de seu diâmetro, o que lhe permitiu pegar e segurar uma variedade de alimentos macios sem causar danos. Ele também pode pegar garrafas pesando mais de dois quilos.
"Empresas como Amazon e JD querem ser capazes de pegar uma gama mais ampla de objetos delicados ou de formato irregular, mas não pode com pinças com ventosas e com base nos dedos, "diz Shuguang Li, um pós-doutorado conjunto no MIT CSAIL e na Escola de Engenharia e Ciências Aplicadas John A. Paulson de Harvard (SEAS). "As ventosas não conseguem apanhar nada com buracos - e precisam de algo muito mais forte do que uma pinça com base em dedos macios."
O robô atualmente funciona melhor com objetos cilíndricos como garrafas ou latas, o que poderia um dia torná-lo um trunfo para linhas de produção nas fábricas. Não surpreendentemente, o formato da garra torna mais difícil agarrar algo plano, como um sanduíche ou um livro.
"Um dos principais recursos dessa abordagem para a construção do manipulador é sua simplicidade, "diz Robert Wood, co-autor e professor da Escola de Engenharia de Harvard e do Wyss Institute for Biologicamente Inspired Engineering. "Os materiais e estratégias de fabricação usados nos permitem criar rapidamente novos protótipos de garras, personalizado para objeto ou ambiente conforme necessário. "
No futuro, a equipe espera tentar resolver o problema de ângulo e orientação adicionando visão computacional que deixaria a garra "ver", e possibilitar a apreensão de partes específicas de objetos.
"Este é um dispositivo muito inteligente que usa o poder da impressão 3-D, um vácuo, e robótica suave para abordar o problema de agarrar de uma maneira totalmente nova, "diz Michael Wehner, professora assistente de robótica da UC-Santa Cruz que não esteve envolvida no projeto. "Nos próximos anos, Eu poderia imaginar ver robôs suaves gentis e hábeis o suficiente para pegar uma rosa, ainda forte o suficiente para levantar com segurança um paciente de hospital. "