Usando uma técnica de aprendizado de máquina para tornar um robô canino mais ágil e rápido
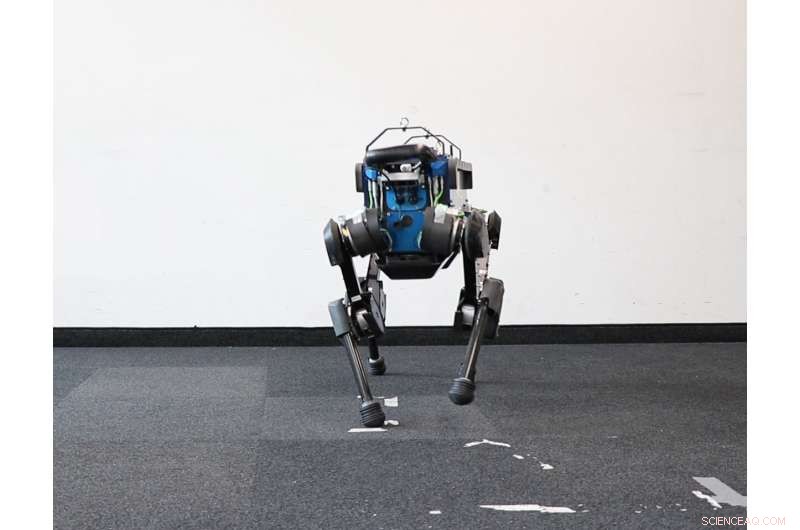 p O robô ANYmal. Crédito:Hwangbo et al., Sci. Robô. 4, eaau5872 (2019)
p O robô ANYmal. Crédito:Hwangbo et al., Sci. Robô. 4, eaau5872 (2019)
p Uma equipe de pesquisadores do Robotic Systems Lab na Suíça e do Intelligent Systems Lab na Alemanha e nos EUA encontrou uma maneira de aplicar o aprendizado de máquina à robótica para dar a essas máquinas maiores habilidades. Em seu artigo publicado na revista
Ciência Robótica , o grupo descreve como aplicaram o aprendizado de máquina à robótica e, com isso, deram a um robô canino mais agilidade e velocidade. p O aprendizado de máquina tem sido muito notícia ultimamente, como tais sistemas continuam a aumentar as habilidades humanas, dando-lhes capacidades sem precedentes. Neste novo esforço, os pesquisadores procuraram aplicar parte desse mesmo aprimoramento a um robô parecido com um cachorro chamado ANYmal - uma máquina sem amarras do tamanho de um cachorro grande que pode andar por aí de maneiras muito semelhantes às de um animal real. ANYmal foi originalmente criado por uma equipe do Robotic Systems Lab e foi comercializado. Agora, a empresa fez uma parceria com o Intelligent Systems Lab para dar ao robô a capacidade de aprender como fazer as coisas que faz por meio da prática, ao invés de programação.
p O aprendizado de máquina funciona definindo metas para um sistema e, em seguida, fornecendo a ele um meio de testar maneiras de atingir essas metas - melhorando continuamente à medida que os benchmarks são alcançados. O teste é feito continuamente, às vezes milhares de vezes. Esse teste é difícil com um robô por causa dos muitos fatores envolvidos (como todos os atributos envolvidos na manutenção do equilíbrio) e por causa do grande investimento de tempo. Depois de descobrir uma maneira de resolver o primeiro problema, os pesquisadores encontraram uma maneira de contornar o segundo. Em vez de ter QUALQUER luta através de seu regime de aprendizagem no mundo real, os pesquisadores criaram uma versão virtual do robô que poderia ser executada em um computador desktop simples.
p Os pesquisadores observam que permitir que o robô aprenda enquanto está em sua encarnação virtual foi aproximadamente 1000 vezes mais rápido do que seria no mundo real. Eles deixaram o cão virtual treinar por até 11 horas e depois baixaram os resultados para o robô físico. Os testes mostraram que a abordagem funcionou muito bem. A versão nova e aprimorada do ANYmal era mais ágil (capaz de evitar que um humano o chutasse e se endireitar se ele caísse) e funcionava aproximadamente 25% mais rápido.
Um vídeo narrado e legendado resumindo os métodos usados para programar um robô ANYmal e mostrando imagens dos vários recursos do robô programado. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) Vídeo de um ANYmal programado com o controlador deste estudo caminhando e resistindo ao abuso de seus criadores humanos. Em comparação com os controladores existentes usados para executar o robô ANYmal, este programa treinado faz ANYmal andar com mais precisão, usando menos torque e menos potência. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) Vídeo de uma corrida ANYmal. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) 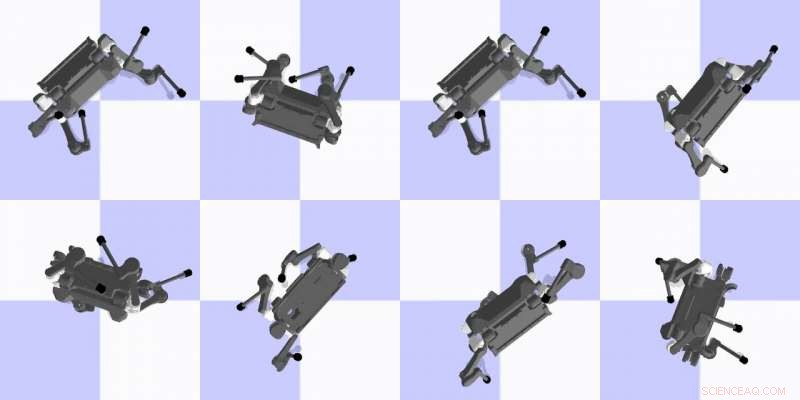 p Diferentes configurações de queda do robô ANYmal. Crédito:Hwangbo et al., Sci. Robô. 4, eaau5872 (2019)
Vídeo do ANYmal se recuperando de várias posições de queda usando o controlador. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) Vídeo mostrando a comparação entre o controlador aprendido deste estudo e o controlador de locomoção existente de melhor desempenho disponível para ANYmal (rotulado como o "controlador baseado em modelo" neste vídeo). O erro de rastreamento do controlador baseado em modelo é cerca de 95% maior do que nosso controlador aprendido em relação à velocidade linear e cerca de 60% maior em relação à taxa de guinada. Também, o ANYmal programado no controlador aprendido usa menos torque e potência mecânica. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) #RoboFail. Um ANYmal programado em um controlador alternativo (treinando com um modelo de atuador ideal) cai enquanto caminha. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) #RoboFail. Um ANYmal programado em um controlador alternativo (treinamento com um modelo de atuador analítico) cai enquanto caminha. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019)
p Diferentes configurações de queda do robô ANYmal. Crédito:Hwangbo et al., Sci. Robô. 4, eaau5872 (2019)
Vídeo do ANYmal se recuperando de várias posições de queda usando o controlador. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) Vídeo mostrando a comparação entre o controlador aprendido deste estudo e o controlador de locomoção existente de melhor desempenho disponível para ANYmal (rotulado como o "controlador baseado em modelo" neste vídeo). O erro de rastreamento do controlador baseado em modelo é cerca de 95% maior do que nosso controlador aprendido em relação à velocidade linear e cerca de 60% maior em relação à taxa de guinada. Também, o ANYmal programado no controlador aprendido usa menos torque e potência mecânica. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) #RoboFail. Um ANYmal programado em um controlador alternativo (treinando com um modelo de atuador ideal) cai enquanto caminha. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) #RoboFail. Um ANYmal programado em um controlador alternativo (treinamento com um modelo de atuador analítico) cai enquanto caminha. Crédito:Hwangbo et al., Sci. Robô . 4, eaau5872 (2019) p © 2019 Science X Network














