Snapshots enquanto os robôs navegam por diferentes ambientes desconhecidos usando o algoritmo proposto neste trabalho. Crédito:Govind Aadithya R et al.
Pesquisadores do Instituto SRM de Ciência e Tecnologia na Índia desenvolveram recentemente um algoritmo de geração de trajetória descentralizada para sistemas multiagentes. Seu algoritmo, apresentado em um artigo pré-publicado no arXiv, pode gerar trajetórias livres de colisão para robôs quando fornecido com um estado inicial e pose final desejada.
"Govind e sua equipe ambiciosamente me abordaram em busca de minha sugestão para o projeto de bacharelado, "Sivanathan K, pesquisador sênior que supervisionou o estudo, disse TechXplore. "Conhecendo suas habilidades matemáticas, Achei que eles deveriam receber um problema desafiador que o futuro está esperando para resolver. Enquanto o mundo está se movendo em direção a carros autônomos, Sugeri desenvolver um algoritmo descentralizado para veículos autônomos para navegar nas interseções. Sentimos que o desempenho do algoritmo não estava de acordo com os padrões, então estendemos o trabalho para desenvolver um algoritmo que pudesse permitir que veículos autônomos navegassem por um ambiente desconhecido, evitando colisão com outros robôs / obstáculos. "
Os sistemas multi-robôs envolvem vários agentes robóticos ou veículos autônomos que colaboram em uma variedade de tarefas. Esses sistemas podem ter aplicações interessantes em várias áreas, incluindo transporte, entretenimento, segurança e exploração espacial.
Quando vários robôs estão trabalhando juntos em uma determinada tarefa, suas trajetórias requerem um planejamento cuidadoso para garantir que os robôs não colidam uns com os outros e que seus limites dinâmicos não sejam violados. Até aqui, a maioria das abordagens para geração de trajetória foi centralizada, o que significa que eles geram trajetórias de antemão e depois as transmitem para robôs individuais.
Embora as abordagens centralizadas funcionem bem em ambientes conhecidos e com um número limitado de robôs, eles são muito difíceis de aplicar em uma escala maior. Nos últimos anos, Portanto, pesquisadores têm trabalhado em abordagens descentralizadas que podem continuamente redesenhar as trajetórias, responder a mudanças inesperadas ou obstáculos no ambiente.
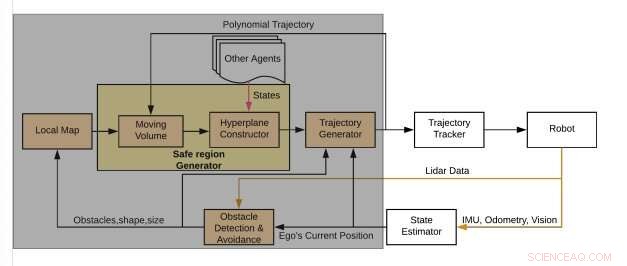
A visão geral do sistema de um agente individual. As setas laranja representam dados brutos, o vermelho representa os dados de fontes externas e o preto representa os dados processados e o fluxo. O foco deste trabalho é a parte sombreada. Crédito:Govind Aadithya R et al.
A equipe de pesquisadores do SRM Institute desenvolveu um novo algoritmo descentralizado para geração de trajetória de sistemas multiagentes. Sua abordagem segue um processo de duas etapas, gerar regiões convexas livres de colisão nas quais um robô será restringido, prevendo as posições de outros robôs.
“Nossa abordagem tem dois sub-objetivos. O primeiro é a identificação do meio ambiente, que inclui geração de mapa para o self e previsão de trajetória para outros no ambiente para identificar a região segura do ego (do ponto de vista do veículo de interesse), "Govind Aadithya R, um dos pesquisadores que realizou o estudo, Told TechXplore. “Depois vem o objetivo de navegar dentro da região segura para chegar ao destino desejado, para o qual geramos a trajetória do ego com a informação disponível e a re-planejamos regularmente para dar conta das mudanças que acontecem ao redor do ego. Para garantir que o ego está se movendo ao longo do caminho especificado, os estados são rastreados usando um rastreador de trajetória. "
Govind e seus colegas empregaram um método simples para detecção de obstáculos, usando mapas locais baseados em forma para formular regiões seguras para agentes individuais. Com base nesses dados, seu algoritmo prevê trajetórias para outros robôs e as incorpora ao modelo para evitar colisões, redimensionando as regiões nas quais um robô pode navegar sem colidir.
"Para mim, uma das conclusões mais significativas deste trabalho é que a verificação de colisão em tempo contínuo é de importância primordial para uma navegação segura e livre de colisões, "Shravan Krishnan, outro pesquisador envolvido no estudo, disse TechXplore. "Também, para evitar colisões, descobrimos que técnicas de mapeamento complexas não são de suma importância, mas ainda são uma necessidade ao lidar com o uso ideal do espaço. Isso implica que, para manobras conservadoras, as representações de obstáculos baseadas em geometria simples são suficientes, mas para manobras dinâmicas e agressivas que utilizam todo o espaço, geometrias complexas são uma necessidade. "
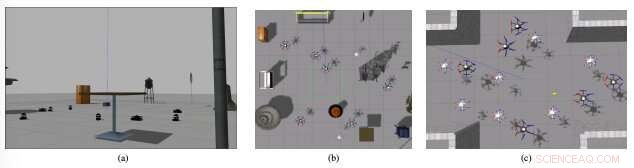
Os pesquisadores avaliaram sua abordagem em simulações na plataforma Gazebo, usando ROS com robôs aéreos planos e robôs com rodas não holonômicos; em ambientes tipo interseção e não estruturados. Seu algoritmo foi capaz de gerar efetivamente trajetórias suaves em ambientes restritos, evitando colisões entre robôs.
"Levando isso adiante, gostaríamos de estender o algoritmo em 3-D, adicionando mais uma dimensão, "Vijay Arvindh B, um dos pesquisadores que realizou o estudo, disse TechXplore. "No momento, estamos trabalhando nas falhas que precisam ser corrigidas para avaliar o algoritmo em 3-D."
© 2019 Science X Network