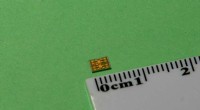
O Autosub Long Range 6000 AUV do National Oceanography Centre, antes da implantação sob a plataforma de gelo FilchnerRonne na Antártica. Crédito:Sprague et al.
Pesquisadores do Royal Institute of Technology (KTH) e do National Oceanography Center usaram recentemente árvores comportamentais (BTs) para projetar módulos, versátil, e arquiteturas de controle robustas para missões críticas. Seu estudo, pré-publicado no arXiv, aplicou especificamente uma estrutura BT ao sistema de controle de veículos subaquáticos autônomos (AUVs).
AUVs são veículos subaquáticos usados para uma variedade de missões, como detectar e mapear objetos submersos ou identificar obstáculos e perigos de navegação. Devido às limitações em sua largura de banda e alcance de comunicação, esses veículos não podem depender de soluções de teleoperação usadas por robôs aéreos ou terrestres.
Além disso, AUVs são geralmente implantados em áreas remotas, portanto, recuperá-los após um defeito costuma ser muito desafiador e caro. Para enfrentar esses desafios, Os sistemas de controle AUV devem ser robustos e versáteis, garantindo a segurança do veículo e adaptando-se às diferentes situações.
A equipe de pesquisadores do KTH e do National Oceanography Center tentou enfrentar esses desafios usando árvores de comportamento (BTs), modelos matemáticos que recentemente se tornaram cada vez mais populares no campo da IA e da robótica. Os BTs foram desenvolvidos inicialmente para videogames para aumentar a modularidade das estruturas de controle de personagens não-jogadores (NPC).
"Esta modularidade permite testes eficientes, design de funcionalidade incremental e reutilização de código, todos os quais têm sido bastante vantajosos na indústria de videogames, "Christopher Iliffe Sprague, um dos pesquisadores que realizou o estudo, disse TechXplore. "De forma similar, consideramos esses aspectos bastante úteis no projeto de inteligência artificial robótica (IA), os principais benefícios são que os comportamentos podem ser reutilizados e testados no contexto de outros comportamentos de nível superior, sem especificar sua relação com os comportamentos subsequentes. Esses são benefícios impressionantes em relação às máquinas de estado finito mais convencionalmente usadas. "
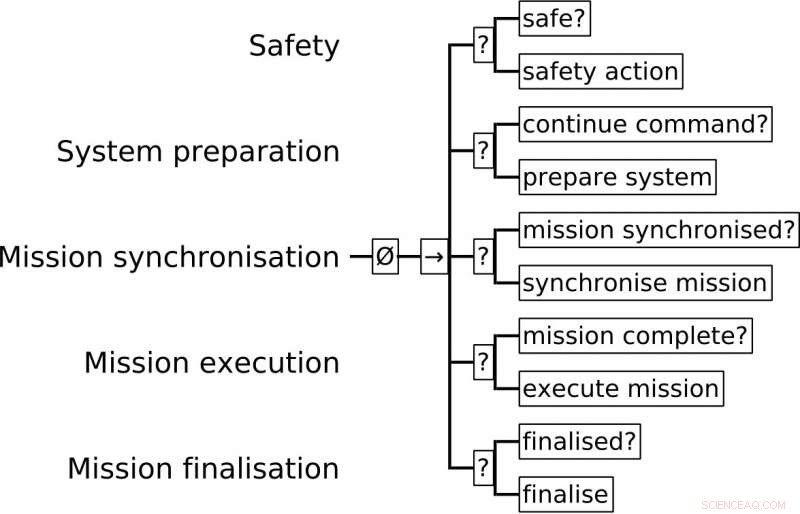
Sistema geral de missão crítica BT. A robustez é alcançada verificando sempre as condições de segurança e tomando as medidas adequadas quando necessário. Crédito:Sprague et al.
Essencialmente, Os BTs fornecem uma estrutura hierárquica para alternar entre várias tarefas. Em sistemas de missão crítica, como veículos de reconhecimento ou carros autônomos, um objetivo exagerado pode frequentemente ser dividido em várias subtarefas. Portanto, Os BTs podem ajudar a estruturar melhor essas tarefas e alternar entre elas.
"Com a estrutura hierárquica inerente dos BTs, as tarefas podem ser decompostas em um grau variável de especificidade, "Sprague explicou." Em nosso jornal, mostramos isso no contexto de AUVs encarregados de executar uma missão definida por uma sequência de waypoints. Geralmente, primeiro definimos um BT que atenda aos requisitos do domínio do sistema (ou seja, veículos subaquáticos), em seguida, refine ainda mais o BT adicionando subtarefas pertencentes a objetivos específicos. "
Sprague e seus colegas aplicaram esse processo de refinamento BT a uma missão AUV realizada pelo Instituto Nacional de Oceanografia. Sua estrutura BT tornou os sistemas de controle AUV mais robustos, monitorar sua segurança antes de prosseguir para outras tarefas subsequentes. BTs também permitiam maior versatilidade, priorizando subtarefas e permitindo que o sistema alterne com flexibilidade entre elas.
"O mais significativo dos resultados do nosso estudo é que mostramos como as árvores de comportamento podem ser primeiro delineadas para atender aos requisitos gerais de domínio e, em seguida, refinado ainda mais para missões específicas, sem sacrificar a estrutura da árvore original, "Sprague disse." A conclusão crucial disso é que se pode incutir certas prioridades de tarefas, a segurança sendo o mais importante, e retê-los, não importa o quão específica à missão a árvore se torne. "
Sprague e seus colegas demonstraram com sucesso as vantagens de usar BTs para controlar sistemas de missão crítica, como AUVs. Contudo, o grau em que as tarefas podem ser abstraídas usando BTs ainda é limitado pela capacidade humana de identificar decomposições de tarefas. Embora em alguns casos as tarefas possam ser divididas intuitivamente, em outros, os comportamentos do sistema são muito mais complexos.
"Agora buscamos sintetizar automaticamente BTs a partir do exemplo, com a otimização em mente, "Sprague disse." Em outro jornal, investigamos como implementar o controle ideal com métodos de aprendizado de máquina para tarefas específicas. Gostaríamos agora de investigar o uso de tais métodos para identificar e otimizar tarefas e estruturas de árvore gerais a partir do exemplo. Suspeitamos que isso irá revelar comportamentos que são difíceis de identificar pelos humanos. "
© 2018 Science X Network