Esta figura mostra um braço de robô hidráulico de sete eixos quebrando lajes de concreto, cada 30 mm de espessura. Este é um protótipo para comparação com um robô de quatro patas também sendo desenvolvido neste projeto pela Universidade Waseda, Universidade Meiji, e outros, produzidos aproximadamente com o mesmo tamanho. É composto por sete dos novos motores hidráulicos. Crédito:Laboratório Suzumori
Pesquisadores do Instituto de Tecnologia de Tóquio (Tokyo Tech) desenvolveram um atuador hidráulico que permitirá que robôs resistentes operem em locais de desastre e outros ambientes hostis. A Tokyo Tech Venture H-MUSCLE Corporation foi estabelecida para buscar aplicações para o atuador, e o envio de amostras de produtos começará em fevereiro de 2019.
A maioria dos robôs de hoje é movida por motores elétricos, mas atuadores hidráulicos, com seu alto rendimento e resistência ao impacto, seria bem adequado para robôs operando em ambientes hostis. Contudo, atuadores hidráulicos típicos são desenvolvidos para máquinas industriais, como pás elétricas, e são muito grandes e pesados para serem usados em robôs; nem podem fornecer movimento suave ou controle de força.
Koichi Suzumori, professor da Escola de Engenharia de Tóquio, e colegas desenvolveram um atuador hidráulico para resolver esses problemas. O atuador oferece muito mais potência e resistência a choques em comparação com motores elétricos convencionais. Também concede um tamanho menor, maior produção (razão força-massa), e controle mais suave em comparação com atuadores hidráulicos convencionais. Fornecendo alta potência, durabilidade, e excelente controle, o atuador permitirá que os robôs operem nos ambientes mais adversos e realizem trabalhos difíceis com um toque suave.
Este atuador hidráulico é o resultado do Tough Robotics Challenge, organizado pelo Programa Impulsing Paradigm Change through Disruptive Technologies (ImPACT) do Cabinet Office of Japan. Tokyo Tech; JPN Co., Ltd .; Bridgestone Corporation; e KYB Corporation; junto com outras universidades e empresas preocupadas com equipamentos hidráulicos, participamos do desenvolvimento do atuador hidráulico para robôs resistentes desde 2014. Para promover a adoção da tecnologia, A H-MUSCLE enviará amostras de seus cilindros hidráulicos e motores hidráulicos para fabricantes nacionais, expandir sua linha de atuadores para venda futura, e explorar outras aplicações.
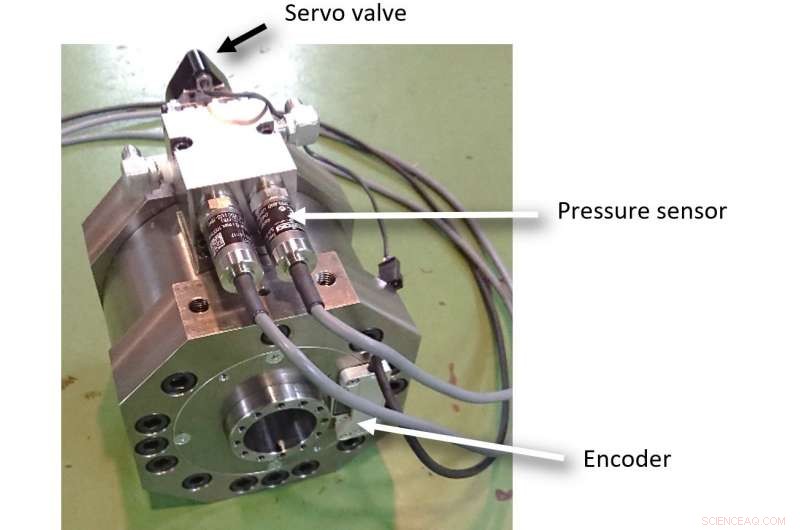
Um pequeno, leve, motor de deslizamento suave. Crédito:laboratório Suzumori
Fundo
O Desafio Robótica ImPACT Tough (2014-2018, Gerente de programa:Satoshi Tadokoro, Professor, Tohoku University) conduziu pesquisas com o objetivo de criar robôs para operações difíceis, mesmo em locais de desastres extremos. Como parte deste projeto, atuadores hidráulicos específicos para robôs e sua aplicação robótica foi definida como um tema de pesquisa. Koichi Suzumori (robótica, engenharia de atuador) em Tokyo Tech foi o líder do grupo com os participantes Tokyo Tech; Okayama University; Universidade Ritsumeikan, JPN Co., Ltd .; Bridgestone Corporation; e KYB Corporation. Com a cooperação de muitas outras empresas com tecnologias altamente especializadas, eles conseguiram desenvolver um atuador para robôs hidráulicos que é pequeno, leve, alto rendimento, e deslizamento suave, algo não disponível em produtos existentes.
Méritos de pequeno, leve, atuadores de deslizamento suave
O novo atuador hidráulico oferece os seguintes avanços em relação aos atuadores hidráulicos existentes.
A ImPACT construiu vários protótipos robustos de robô para testar aplicações potenciais para o atuador hidráulico.
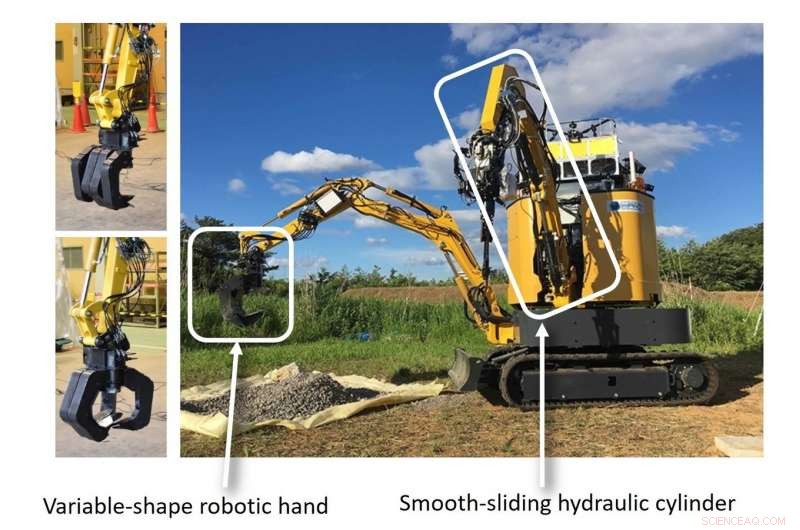
Um robô de construção sendo desenvolvido pela Komatsu, Universidade de Osaka, e outros. O menor dos dois braços é acionado por cilindros de deslizamento suave desenvolvidos neste programa, contribuindo para sua habilidade de fazer manipulações finas. A extremidade do outro braço é equipada com uma mão hidráulica usando o novo atuador hidráulico. Com quatro dedos, ele pode ser usado no modo de pá ou no modo manual, conforme necessário. No modo manual, pode agarrar objetos de diferentes formas e controlar a força do aperto. Crédito:Komatsu, Universidade de Osaka, Instituto de Tecnologia de Tóquio