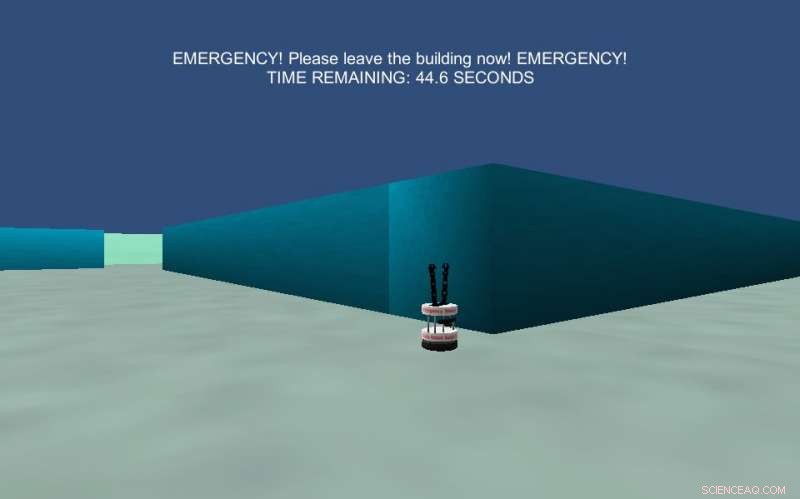
A imagem mostra um experimento de navegação em labirinto que foi descrito como uma situação de emergência. Os participantes foram informados de que sua tarefa era agir como se estivessem em uma evacuação de emergência e precisassem encontrar uma saída em 30 segundos para sobreviver. Crédito:Wagner et al.
Pesquisadores da Pennsylvania State University, O MIT e o Instituto de Tecnologia da Geórgia desenvolveram recentemente uma estrutura conceitual para modelar o fenômeno de confiança entre humanos e robôs. Sua estrutura, descrito em um artigo publicado na ACM Digital Library, usa representações computacionais inspiradas na teoria dos jogos para representar a confiança, uma noção definida usando a teoria em psicologia social.
A confiança desempenha um papel fundamental nas interações interpessoais, tanto em ambientes profissionais quanto pessoais. Quando uma pessoa confia em outra, eles podem decidir fazer algo que os coloque em risco considerável, tendo a crença de que as ações do outro irão mitigar um pouco esse risco.
Quando se trata de definir confiança, muitos pesquisadores concordam que isso acarreta uma situação em que um indivíduo é vulnerável e essa vulnerabilidade depende das ações, motivações, ou comportamentos de outro. Alan R. Wagner, Paul Robinette, e Ayanna Howard, os três pesquisadores por trás do estudo recente, queria criar uma estrutura que pudesse ser usada para modelar a confiança interpessoal entre humanos e robôs.
“Estamos interessados em desenvolver robôs que saibam quando confiar nos humanos, entender quais situações exigem confiança e atrair a quantidade certa de confiança dos humanos, "Robinette explicou." Inicialmente, fomos motivados por pesquisas que sugerem que às vezes as pessoas fazem coisas estranhas quando um robô pede, como jogar fora livros caros e derramar suco de laranja em um vaso de plantas. Há também um número crescente de situações em que humanos se colocam em risco nas mãos de um robô (por exemplo, carros autônomos, drones voando acima, guardas de segurança de robôs, etc.). Queríamos, portanto, desenvolver uma estrutura que permitisse aos robôs entender as relações de confiança com os humanos. "
A estrutura conceitual desenvolvida por Wagner e seus colegas gerou várias hipóteses testáveis relacionadas à confiança humano-robô. Em seu estudo, os pesquisadores examinaram essas hipóteses geradas e realizaram uma série de experimentos, reunir tanto as evidências que apoiaram sua estrutura e conflitaram com ela.
"A estrutura de confiança começou na pesquisa de Alan, que definiu a confiança de uma forma que os computadores, e, portanto, robôs, pode utilizar, "Robinette disse.
Em seu trabalho anterior, Wagner definiu a confiança situacional como 'uma crença, realizada pelo fiador, que o agente fiduciário agirá de maneira a mitigar o risco do agente fiduciário em uma situação na qual o agente fiduciário tenha colocado seus resultados em risco ”. Sua definição se concentra principalmente no risco envolvido em uma determinada situação, também destacando a crença de que uma pessoa / robô atuará para reduzir o risco para a outra pessoa / robô.
"Nossa estrutura fornece critérios para o que constitui uma situação de confiança e fornece várias categorias de situações que não exigem confiança, por exemplo, onde não há risco para o criador ou onde o risco não pode ser mitigado por um motivo ou outro, "Robinette disse." Com esta estrutura, um robô pode avaliar por si mesmo se a situação em que se encontra requer confiança ou não, e então agir de forma adequada. "
Os pesquisadores testaram as hipóteses geradas por sua estrutura em uma série de testes e experimentos. Por exemplo, em um experimento, eles apresentaram a um grupo de participantes humanos cenários que envolviam confiar ou não confiar em outra pessoa, em seguida, perguntou-lhes qual dessas duas opções eles escolheriam. Os participantes concordaram com as condições de confiança geradas por sua estrutura, em um grau muito alto.
Os pesquisadores realizaram vários outros experimentos que avaliaram a precisão das hipóteses geradas por sua estrutura conceitual. Algumas dessas evidências reunidas que apóiam essas hipóteses, enquanto alguns produziram resultados conflitantes.
"Acho que a descoberta mais significativa deste trabalho é que encontramos evidências de apoio consideráveis para esta estrutura em estudos com muitos participantes de diversas origens, "Robinette disse." Isso significa que a estrutura de confiança pode ser usada na maioria das situações, permitindo que os robôs entendam melhor por que os humanos ao seu redor estão agindo daquela maneira. O robô pode até ser capaz de usar esta estrutura para orientar humanos para situações menos arriscadas, por exemplo, reconhecendo que uma pessoa está depositando muita confiança em um robô, talvez para fazer algo para o qual não foi programado, e informar a pessoa de seu erro. "
A estrutura desenvolvida por Wagner e seus colegas pode ser aplicada a uma variedade de situações que envolvem confiança entre humanos e robôs. Howver, em alguns casos, as hipóteses da estrutura não eram suficientemente precisas, por exemplo, quando as pessoas foram solicitadas a confiar em um robô no que parecia ser uma situação de emergência.
Essas descobertas são valiosas, no entanto, à medida que lançam luz sobre áreas específicas nas quais as pessoas acham mais difícil confiar em robôs. Pesquisas futuras poderiam examinar mais de perto por que os participantes fizeram essas escolhas e o que os impediu de confiar nos robôs, ao mesmo tempo que explora maneiras pelas quais os engenheiros de robótica podem aumentar a segurança em torno dos robôs.
"Alan e Ayanna têm trabalhado para estender esta pesquisa ao domínio da robótica de saúde, "Robinette disse." Eu acredito que Alan também tem um projeto para investigar robôs de evacuação de emergência e sua relação com as pessoas em maiores detalhes. Recentemente, estive trabalhando em equipes homem-máquina e planejo aplicar essa estrutura de confiança ao relacionamento entre os humanos e os robôs com os quais trabalham. "
© 2018 Science X Network