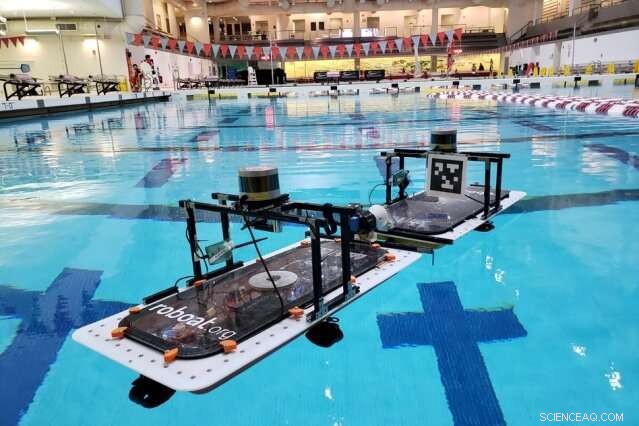
Os pesquisadores do MIT deram à sua frota de “roboats” autônomos a capacidade de mirar e se agarrar automaticamente - e continuar tentando se eles falharem. Os roboats estão sendo projetados para transportar pessoas, recolher o lixo, e auto-montagem em estruturas flutuantes nos canais de Amsterdã. Crédito:Massachusetts Institute of Technology
A cidade de Amsterdã vislumbra um futuro onde frotas de barcos autônomos cruzam seus muitos canais para transportar mercadorias e pessoas, recolher o lixo, ou auto-montagem em estágios flutuantes e pontes. Para promover essa visão, Os pesquisadores do MIT deram novos recursos à sua frota de barcos robóticos - que estão sendo desenvolvidos como parte de um projeto em andamento - que os permite mirar e agarrar uns aos outros, e continue tentando se eles falharem.
Cerca de um quarto da superfície de Amsterdã é água, com 165 canais serpenteando ao longo das movimentadas ruas da cidade. Vários anos atrás, O MIT e o Instituto de Amsterdã para Soluções Metropolitanas Avançadas (Instituto AMS) uniram-se no projeto "Roboat". A ideia é construir uma frota de barcos robóticos autônomos - cascos retangulares equipados com sensores, propulsores, microcontroladores, Módulos GPS, máquinas fotográficas, e outro hardware - que fornece mobilidade inteligente na água para aliviar o congestionamento nas ruas movimentadas da cidade.
Um dos objetivos do projeto é criar unidades roboat que forneçam transporte sob demanda em hidrovias. Outro objetivo é usar as unidades roboat para formar estruturas "pop-up" automaticamente, como passarelas, estágios de desempenho, ou mesmo mercados de alimentos. As estruturas podem então ser desmontadas automaticamente em horários definidos e reformar em estruturas de destino para diferentes atividades. Adicionalmente, as unidades roboat podem ser usadas como sensores ágeis para coletar dados sobre a infraestrutura da cidade, e a qualidade do ar e da água, entre outras coisas.
Em 2016, Os pesquisadores do MIT testaram um protótipo de roboat que cruzou os canais de Amsterdã, avançando, para trás, e lateralmente ao longo de um caminho pré-programado. Ano passado, pesquisadores projetaram baixo custo, 3-D-impresso, versões em escala de um quarto dos barcos, que eram mais eficientes e ágeis, e vem equipado com algoritmos avançados de rastreamento de trajetória.
Em um artigo apresentado na Conferência Internacional sobre Robótica e Automação, os pesquisadores descrevem unidades roboat que agora podem identificar e se conectar a estações de acoplamento. Algoritmos de controle guiam os robôs até o alvo, onde eles se conectam automaticamente a um mecanismo de travamento personalizado com precisão milimétrica. Além disso, o roboat percebe se perdeu a conexão, faz backup, e tenta novamente.
Os pesquisadores testaram a técnica de travamento em uma piscina no MIT e no rio Charles, onde as águas são mais agitadas. Em ambos os casos, as unidades roboat geralmente eram capazes de se conectar com sucesso em cerca de 10 segundos, começando a cerca de 1 metro de distância, ou eles tiveram sucesso após algumas tentativas fracassadas. Em Amsterdã, o sistema pode ser especialmente útil para a coleta de lixo durante a noite. Unidades Roboat podem navegar ao redor de um canal, localize e trave em plataformas que seguram contêineres de lixo, e transportá-los de volta para as instalações de coleta.
"Em Amsterdã, canais já foram usados para transporte e outras coisas para as quais as estradas agora são usadas. As estradas perto dos canais agora estão muito congestionadas - e têm ruído e poluição - então a cidade quer adicionar mais funcionalidade aos canais, "diz o primeiro autor Luis Mateos, é pós-graduanda do Departamento de Estudos e Planejamento Urbano (DUSP) e pesquisadora do MIT Senseable City Lab. "As tecnologias de direção autônoma podem economizar tempo, custos e energia, e melhorar a cidade daqui para frente. "
"O objetivo é usar unidades roboat para trazer novos recursos para a vida na água, "acrescenta a co-autora Daniela Rus, diretor do Laboratório de Ciência da Computação e Inteligência Artificial (CSAIL) e os Professores Andrew e Erna Viterbi de Engenharia Elétrica e Ciência da Computação. "O novo mecanismo de travamento é muito importante para a criação de estruturas pop-up. O Roboat não precisa de travamento para transporte autônomo na água, but you need the latching to create any structure, whether it's mobile or fixed."
Joining Mateos on the paper are:Wei Wang, a joint postdoc in CSAIL and the Senseable City Lab; Banti Gheneti, a graduate student in the Department of Electrical Engineering and Computer Science; Fabio Duarte, a DUSP and Senseable City Lab research scientist; and Carlo Ratti, director of the Senseable City Lab and a principal investigator and professor of the practice in DUSP.
Making the connection
Each roboat is equipped with latching mechanisms, including ball and socket components, on its front, de volta, e os lados. The ball component resembles a badminton shuttlecock—a cone-shaped, rubber body with a metal ball at the end. The socket component is a wide funnel that guides the ball component into a receptor. Inside the funnel, a laser beam acts like a security system that detects when the ball crosses into the receptor. That activates a mechanism with three arms that closes around and captures the ball, while also sending a feedback signal to both roboats that the connection is complete.
On the software side, the roboats run on custom computer vision and control techniques. Each roboat has a LIDAR system and camera, so they can autonomously move from point to point around the canals. Each docking station—typically an unmoving roboat—has a sheet of paper imprinted with an augmented reality tag, called an AprilTag, which resembles a simplified QR code. Commonly used for robotic applications, AprilTags enable robots to detect and compute their precise 3-D position and orientation relative to the tag.
Both the AprilTags and cameras are located in the same locations in center of the roboats. When a traveling roboat is roughly one or two meters away from the stationary AprilTag, the roboat calculates its position and orientation to the tag. Tipicamente, this would generate a 3-D map for boat motion, including roll, pitch, and yaw (left and right). But an algorithm strips away everything except yaw. This produces an easy-to-compute 2-D plane that measures the roboat camera's distance away and distance left and right of the tag. Usando essas informações, the roboat steers itself toward the tag. By keeping the camera and tag perfectly aligned, the roboat is able to precisely connect.
The funnel compensates for any misalignment in the roboat's pitch (rocking up and down) and heave (vertical up and down), as canal waves are relatively small. Se, Contudo, the roboat goes beyond its calculated distance, and doesn't receive a feedback signal from the laser beam, it knows it has missed. "In challenging waters, sometimes roboat units at the current one-quarter scale, are not strong enough to overcome wind gusts or heavy water currents, " Mateos says. "A logic component on the roboat says, "You missed, so back up, recalculate your position, and try again.""
Future iterations
The researchers are now designing roboat units roughly four times the size of the current iterations, so they'll be more stable on water. Mateos is also working on an update to the funnel that includes tentacle-like rubber grippers that tighten around the pin—like a squid grasping its prey. That could help give the roboat units more control when, dizer, they're towing platforms or other roboats through narrow canals.
In the works is also a system that displays the AprilTags on an LCD monitor that changes codes to signal multiple roboat units to assemble in a given order. Inicialmente, all roboat units will be given a code to stay exactly a meter apart. Então, the code changes to direct the first roboat to latch. After, the screen switches codes to order the next roboat to latch, e assim por diante. "It's like the telephone game. The changing code passes a message to one roboat at a time, and that message tells them what to do, " Mateos says.
Darwin Caldwell, the research director of Advanced Robotics at the Italian Institute of Technology, envisions even more possible applications for the autonomous latching capability. "I can certainly see this type of autonomous docking being of use in many areas of robotic refueling and docking … beyond aquatic/naval systems, " ele diz, "including inflight refueling, space docking, cargo container handling, [and] robot in-house recharging."
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.