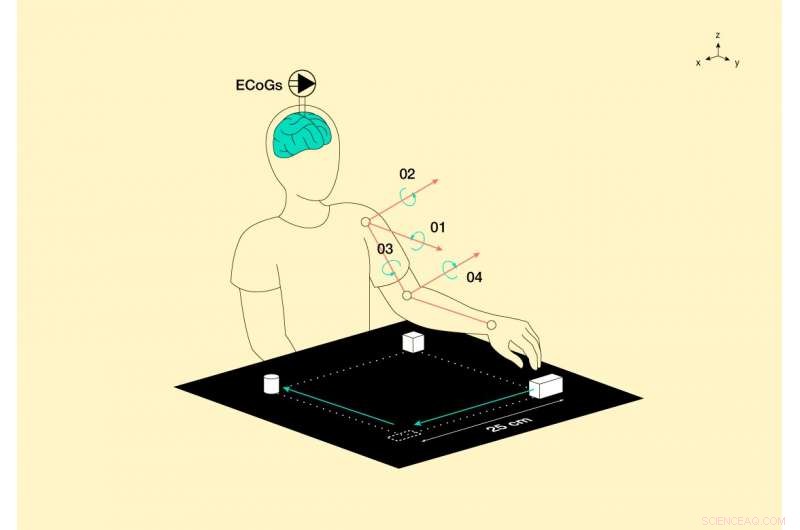
Previsões de movimento das mãos. Crédito:Lion_on_helium / MIPT
Pesquisadores do Instituto de Física e Tecnologia de Moscou desenvolveram um modelo para prever as trajetórias dos movimentos das mãos com base na atividade cortical:os sinais são medidos diretamente no cérebro humano. As previsões baseiam-se em modelos lineares. Isso descarrega o processador, uma vez que requer menos memória e menos cálculos em comparação com redes neurais. Como resultado, o processador pode ser combinado com um sensor e implantado no crânio. Ao simplificar o modelo sem degradar as previsões, torna-se possível responder às mudanças nos sinais cerebrais. Essa tecnologia pode impulsionar exoesqueletos que permitiriam que pacientes com mobilidade reduzida recuperassem o movimento. O artigo foi publicado em Sistemas especialistas com aplicativos , o jornal líder no campo da inteligência artificial.
Danos na medula espinhal impedem que os sinais motores gerados pelo cérebro cheguem aos músculos. Como resultado, os pacientes não podem mais se mover livremente. Para restaurar o movimento, os sinais do córtex cerebral são medidos, decodificado, e transmitido a um exoesqueleto. Decodificar significa interpretar os sinais como uma previsão do movimento desejado do membro. Para captar sinais de alta qualidade, o sensor precisa ser implantado diretamente na caixa craniana.
Implantação cirúrgica de um sensor com eletrodos no córtex motor, a área do cérebro responsável pelos movimentos voluntários, já foi executado. Esse sensor é alimentado por uma bateria compacta recarregada sem fio. O dispositivo vem com uma unidade de processamento que lida com os sinais de entrada, e um transmissor de rádio retransmitindo os dados para um receptor externo. O processador aquece durante a operação, o que se torna problemático, uma vez que está em contato com o cérebro. Isso restringe a energia consumida, o que é crucial para decodificar o sinal.
A medição adequada dos sinais cerebrais é apenas uma parte do desafio. Para usar esses dados para controlar membros artificiais, as trajetórias de movimento precisam ser reconstruídas a partir do eletrocorticograma - um registro da atividade elétrica do cérebro. Este é o ponto de decodificação do sinal. A equipe de pesquisa liderada pelo professor Vadim Strijov do MIPT trabalha em modelos para prever as trajetórias das mãos com base em eletrocorticogramas. Essas previsões são necessárias para habilitar exoesqueletos que os pacientes com função motora prejudicada controlariam imaginando os movimentos naturais de seus membros.
"Recorremos à álgebra linear para prever as trajetórias de movimento dos membros. A vantagem dos modelos lineares sobre as redes neurais é que a otimização dos parâmetros do modelo requer muito menos operações. Isso significa que são adequados para um processador lento e uma memória limitada, "explica Strijov, o autor sênior do artigo.
Superaquecimento do cérebro. Crédito:Lion_on_helium / MIPT
“Resolvemos o problema de construir um modelo que fosse simples, robusto, e preciso, "acrescenta Strijov, que é pesquisador-chefe do Laboratório de Inteligência de Máquina do MIPT. "Simplesmente, Quero dizer, existem relativamente poucos parâmetros. Robustez refere-se à capacidade de reter uma qualidade de previsão razoável sob pequenas alterações de parâmetros. Precisão significa que as previsões se aproximam adequadamente dos movimentos físicos naturais dos membros. Para alcançar isto, prevemos trajetórias de movimento como uma combinação linear das descrições de recursos do eletrocorticograma. "
Cada eletrodo emite seu próprio sinal representado por uma frequência e uma amplitude. As frequências são subdivididas em bandas. A descrição do recurso é um histórico dos valores do sinal do corticograma para cada eletrodo e cada banda de frequência. Este histórico de sinais é uma série temporal, um vetor no espaço linear. Cada característica é, portanto, um vetor. A previsão da trajetória do movimento da mão é calculada como uma combinação linear de vetores de recursos, sua soma ponderada. Para encontrar os pesos ideais para o modelo linear, ou seja, aqueles que resultam em uma previsão adequada - um sistema de equações lineares deve ser resolvido.
Contudo, a solução para o sistema mencionado acima é instável. Isso é uma consequência dos sensores estarem localizados próximos uns dos outros, de modo que os sensores vizinhos emitem sinais semelhantes. Como resultado, a menor mudança nos sinais captados causa uma mudança considerável na previsão da trajetória. Portanto, o problema da redução da dimensionalidade do espaço de recursos precisa ser resolvido.
Os autores do artigo apresentam um método de seleção de recursos com base em dois critérios. Primeiro, os pares de recursos devem ser distintos, e em segundo lugar, suas combinações devem se aproximar razoavelmente bem do vetor alvo. Esta abordagem permite que o conjunto de recursos ideal seja obtido mesmo sem calcular os parâmetros do modelo. Levando em consideração as posições mútuas dos sensores, os pesquisadores criaram um simples, robusto, e um modelo bastante preciso, que é comparável aos seus análogos em termos de qualidade de previsão.
Em seu trabalho futuro, a equipe planeja resolver o problema da descrição da trajetória do membro no caso de uma estrutura cerebral variável.
Strijov explica:"Movendo-se e obtendo uma resposta do meio ambiente, os humanos aprendem. A estrutura do cérebro muda. Novo formulário de conexões, tornando o modelo obsoleto. Precisamos propor um modelo que se adaptasse às mudanças no cérebro mudando sua própria estrutura. Esta tarefa está longe de ser simples, mas estamos trabalhando nisso. "