MIT Spiderlike Grabber (estrutura hexapedal) (antes) Crédito:Yoonho Kim &Xuanhe Zhao
Os engenheiros do MIT criaram soft, Estruturas impressas em 3D cujos movimentos podem ser controlados com uma onda de um ímã, muito parecido com marionetes sem as cordas.
A coleção de estruturas que podem ser manipuladas magneticamente inclui um anel liso que se enruga, um tubo longo que se fecha, uma folha que se dobra, e um "agarrador" semelhante a uma aranha que pode rastejar, lista, pular, e se encaixam rápido o suficiente para pegar uma bola que passe. Ele pode até mesmo ser direcionado para se enrolar em uma pequena pílula e carregá-lo sobre a mesa.
Os pesquisadores fabricaram cada estrutura a partir de um novo tipo de tinta 3-D imprimível que eles infundiram com minúsculas partículas magnéticas. Eles encaixaram um eletroímã em torno do bico de uma impressora 3-D, o que fazia com que as partículas magnéticas balançassem em uma única orientação conforme a tinta era alimentada através do bico. Ao controlar a orientação magnética de seções individuais na estrutura, os pesquisadores podem produzir estruturas e dispositivos que podem mudar quase que instantaneamente para formações intrincadas, e até mesmo se mover, como as várias seções respondem a um campo magnético externo.
Xuanhe Zhao, o Professor de Desenvolvimento de Carreira Noyce no Departamento de Engenharia Mecânica do MIT e no Departamento de Engenharia Civil e Ambiental, diz que a técnica do grupo pode ser usada para fabricar dispositivos biomédicos controlados magneticamente.
“Achamos que na biomedicina esta técnica encontrará aplicações promissoras, "Zhao diz." Por exemplo, poderíamos colocar uma estrutura ao redor de um vaso sanguíneo para controlar o bombeamento de sangue, ou use um ímã para guiar um dispositivo através do trato GI para tirar imagens, extrair amostras de tecido, limpar um bloqueio, ou entregar certos medicamentos em um local específico. Você pode projetar, simular, e, em seguida, basta imprimir para realizar várias funções. "
Zhao e seus colegas publicaram seus resultados hoje na revista Natureza . Seus co-autores incluem Yoonho Kim, Hyunwoo Yuk, e Ruike Zhao do MIT, e Shawn Chester, do New Jersey Institute of Technology.
Um campo mutante
As estruturas magneticamente ativadas da equipe se enquadram na categoria geral de dispositivos acionados macios - moles, materiais moldáveis que são projetados para mudar de forma ou mover-se por uma variedade de meios mecânicos. Por exemplo, os dispositivos de hidrogel aumentam de volume quando a temperatura ou o pH mudam; polímeros com memória de forma e elastômeros de cristal líquido deformam-se com estímulos suficientes, como calor ou luz; dispositivos pneumáticos e hidráulicos podem ser acionados por ar ou água bombeada neles; e os elastômeros dielétricos se alongam sob tensões elétricas.
Mas os hidrogéis, polímeros com memória de forma, e os elastômeros de cristal líquido são lentos para responder, e mudar de forma ao longo de minutos para horas. Dispositivos movidos a ar e água requerem tubos que os conectam às bombas, tornando-os ineficientes para aplicativos controlados remotamente. Elastômeros dielétricos requerem altas tensões, geralmente acima de mil volts.
"Não há candidato ideal para um robô macio que pode atuar em um espaço fechado como um corpo humano, onde você deseja realizar certas tarefas sem restrições, "Kim diz." É por isso que pensamos que há uma grande promessa nesta ideia de atuação magnética, porque é rápido, forte, corpo-benigno, e pode ser controlado remotamente. "
Outros grupos fabricaram materiais ativados magneticamente, embora os movimentos que alcançaram tenham sido relativamente simples. Em geral, pesquisadores misturam uma solução de polímero com contas magnéticas, e despeje a mistura em um molde. Uma vez que o material se cura, eles aplicam um campo magnético para magnetizar uniformemente as contas, antes de remover a estrutura do molde.
"As pessoas só fizeram estruturas alongadas, Psiquiatra, ou dobrar, "Yuk diz." O desafio é, como você projeta uma estrutura ou robô que pode realizar tarefas muito mais complicadas? "
Jogo de domínio
Em vez de fazer estruturas com partículas magnéticas das mesmas, orientação uniforme, a equipe procurou maneiras de criar "domínios" magnéticos - seções individuais de uma estrutura, cada um com uma orientação distinta de partículas magnéticas. Quando exposto a um campo magnético externo, cada seção deve se mover de forma distinta, dependendo da direção em que suas partículas se movem em resposta ao campo magnético. Desta maneira, o grupo supôs que as estruturas deveriam realizar articulações e movimentos mais complexos.
Com sua nova plataforma de impressão 3D, os pesquisadores podem imprimir seções, ou domínios, de uma estrutura, e ajustar a orientação das partículas magnéticas em um domínio particular, mudando a direção do eletroímã que circunda o bico da impressora, conforme o domínio é impresso.
A equipe também desenvolveu um modelo físico que prevê como uma estrutura impressa se deformará sob um campo magnético. Dada a elasticidade do material impresso, o padrão de domínios em uma estrutura, e a forma como um campo magnético externo é aplicado, o modelo pode prever como uma estrutura geral se deformará ou se moverá. Ruike descobriu que as previsões do modelo coincidiam de perto com os experimentos que a equipe realizou com várias estruturas impressas diferentes.
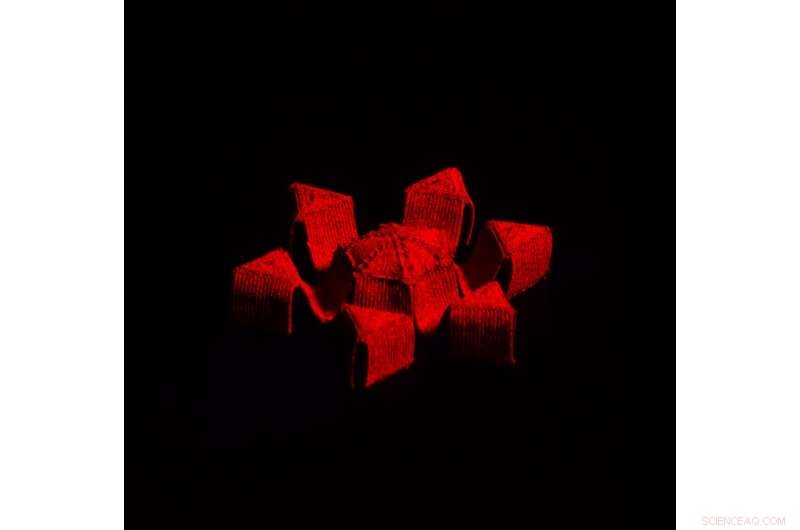
MIT Spiderlike Grabber (estrutura hexapedal) (Depois) Crédito:Yoonho Kim &Xuanhe Zhao
Além de um anel ondulante, um tubo de auto-compressão, e um agarrador parecido com uma aranha, a equipe imprimiu outras estruturas complexas, como um conjunto de estruturas "auxéticas" que encolhem ou expandem rapidamente ao longo de duas direções. Zhao e seus colegas também imprimiram um anel embutido com circuitos elétricos e luzes LED vermelhas e verdes. Dependendo da orientação de um campo magnético externo, o anel deforma para acender em vermelho ou verde, de forma programada.
"Desenvolvemos uma plataforma de impressão e um modelo preditivo para uso de outros. As pessoas podem projetar suas próprias estruturas e padrões de domínio, valide-os com o modelo, e imprimi-los para acionar várias funções, "Zhao diz." Ao programar informações complexas de estrutura, domínio, e campo magnético, pode-se até imprimir máquinas inteligentes, como robôs. "