Crédito:Queensland University of Technology
Os pesquisadores da QUT desenvolveram uma nova maneira para os robôs verem o mundo de uma perspectiva mais humana, que tem o potencial de melhorar a forma como a tecnologia, como carros sem motorista e robôs industriais e móveis, opera e interage com as pessoas.
No que se acredita ser a primeira do mundo, Ph.D. estudante Sourav Garg, Dr. Niko Suenderhauf e Professor Michael Milford da Faculdade de Ciências e Engenharia da QUT e Centro Australiano de Visão Robótica, usaram semântica visual para permitir o reconhecimento de local de alto desempenho de pontos de vista opostos.
Sr. Garg disse, enquanto os humanos têm uma capacidade notável de reconhecer um lugar ao entrar novamente na direção oposta, inclusive em circunstâncias onde há variações extremas em sua aparência, a tarefa apresentou desafios para robôs e veículos autônomos.
"Por exemplo, se uma pessoa estiver dirigindo em uma estrada e fizer o retorno e voltar para a mesma estrada, na direcção oposta, eles têm a capacidade de saber onde estão, com base nessa experiência anterior, porque eles reconhecem os principais aspectos do meio ambiente. As pessoas também podem fazer isso se viajarem pela mesma estrada à noite, e novamente durante o dia, ou durante diferentes temporadas, "Sr. Garg disse.
"Infelizmente, não é tão simples para robôs. Soluções de engenharia atuais, como aqueles usados por carros sem motorista, dependem amplamente de câmeras panorâmicas ou detecção de detecção e alcance de luz de 360 graus (LIDAR). Embora seja eficaz, é muito diferente de como os humanos navegam naturalmente.

Crédito:neyro2008 / Alexander Zelnitskiy / 123rf.com / auth
O professor Michael Milford disse que o sistema proposto pela equipe de pesquisadores do QUT usou uma rede de segmentação semântica de última geração, chamado RefineNet, treinado no conjunto de dados Cityscapes, para formar um descritor de imagens do Tensor Semântico Local (LoST). Isso foi então usado para realizar o reconhecimento de lugar junto com técnicas de visão robótica adicionais com base em verificações de layout espacial e correspondência de pontos-chave ponderados.
"Queríamos replicar o processo usado pelos humanos. A semântica visual funciona não apenas por meio da detecção, mas entender onde os objetos-chave estão no ambiente, e isso permite maior previsibilidade nas ações que se seguem, "Professor Milford disse.
"Nossa abordagem nos permite combinar lugares de pontos de vista opostos com pouca sobreposição visual comum e entre os ciclos diurnos e noturnos. Agora estamos estendendo este trabalho para lidar com pontos de vista opostos e mudanças de pontos de vista laterais, que ocorre, por exemplo, quando um veículo muda de faixa. Isso adiciona um grau extra de dificuldade. "
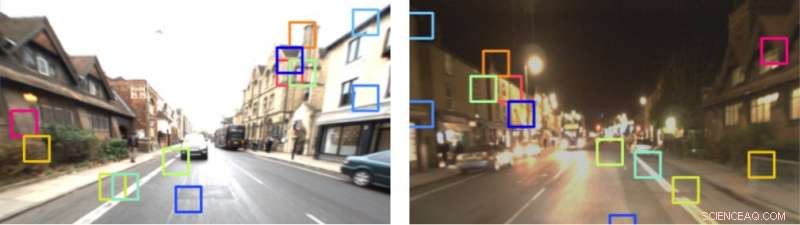
Crédito:1 ano, 1000 km:o conjunto de dados Oxford RobotCar
O artigo da equipe de pesquisa foi aceito para publicação em Robótica:Ciência e Sistemas , a conferência internacional de robótica mais seletiva, que está sendo realizado na Carnegie Mellon University em Pittsburgh neste mês.