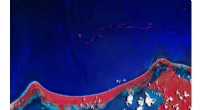
Os pesquisadores do MIT implantam um veículo subaquático autônomo para testar novos algoritmos de navegação e detecção. Crédito:MSEAS
Observar os oceanos do mundo é cada vez mais uma missão atribuída a veículos subaquáticos autônomos (AUVs) - robôs marinhos projetados para flutuar, dirigir, ou deslizar através do oceano sem qualquer entrada em tempo real de operadores humanos. As perguntas críticas que os AUVs podem ajudar a responder são onde, quando, e o que amostrar para os dados mais informativos, e como alcançar os locais de amostragem de maneira ideal.
Os engenheiros do MIT desenvolveram sistemas de equações matemáticas que prevêem os dados mais informativos a serem coletados para uma determinada missão de observação, e a melhor maneira de chegar aos locais de amostragem.
Com seu método, os pesquisadores podem prever o grau em que uma variável, como a velocidade das correntes oceânicas em um determinado local, revela informações sobre alguma outra variável, como a temperatura em algum outro local - uma quantidade chamada "informação mútua". Se o grau de informação mútua entre duas variáveis for alto, um AUV pode ser programado para ir a certos locais para medir uma variável, para obter informações sobre o outro.
A equipe usou suas equações e um modelo de oceano que desenvolveram, chamada Simulação Multidisciplinar, Estimativa, e Sistemas de Assimilação (MSEAS), em experimentos de mar para prever com sucesso campos de informação mútua e guiar AUVs reais.
"Nem todos os dados são iguais, "diz Arkopal Dutt, um estudante de graduação no Departamento de Engenharia Mecânica do MIT. "Nossos critérios ... permitem que as máquinas autônomas identifiquem as localizações dos sensores e os tempos de amostragem onde as medições mais informativas podem ser feitas."
Para determinar como alcançar destinos de amostragem ideais com segurança e eficiência, os pesquisadores desenvolveram uma maneira de ajudar os AUVs a usar a atividade do oceano incerto, prevendo uma "frente de acessibilidade" - uma região tridimensional dinâmica do oceano que um AUV teria garantido alcançar dentro de um certo tempo, dadas as restrições de energia do AUV e as correntes do oceano. O método da equipe permite que um veículo surja nas correntes que o trariam mais perto de seu destino, e evite aqueles que podem desviá-lo do caminho.
Quando os pesquisadores compararam suas previsões de alcançabilidade com as rotas de AUVs reais observando uma região do Mar da Arábia, eles encontraram suas previsões combinadas onde os veículos eram capazes de navegar, durante longos períodos de tempo.
Em última análise, os métodos da equipe devem ajudar os veículos a explorar o oceano de uma forma inteligente, maneira eficiente em termos de energia.
"Robôs marinhos autônomos são nossos batedores, enfrentando o mar agitado para coletar dados para nós, "diz o estudante de graduação em engenharia mecânica Deepak Subramani." Nossas equações matemáticas ajudam os batedores a chegar aos locais desejados e reduzir o uso de energia usando as correntes oceânicas de maneira inteligente. "
Os pesquisadores, liderado por Pierre Lermusiaux, professor de engenharia mecânica e ciências oceânicas e engenharia no MIT, expuseram seus resultados em um artigo que logo aparecerá em um volume da série de livros, "O mar, "publicado pelo Journal of Marine Research.
Além de Dutt e Subramani, A equipe de Lermusiaux inclui Jing Lin, Chinmay Kulkarni, Abhinav Gupta, Tapovan Lolla, Patrick Haley, Wael Hajj Ali, Chris Mirabito, e Sudip Jana, tudo do Departamento de Engenharia Mecânica.
Busca pelos dados mais informativos
Para validar sua abordagem, os pesquisadores mostraram que podiam prever com sucesso as medições mais informativas para um conjunto variado de objetivos. Por exemplo, eles prevêem as observações que foram ideais para testar hipóteses científicas, aprender se as próprias equações do modelo do oceano estão corretas ou não, estimar parâmetros de ecossistemas marinhos, e detectar a presença de estruturas coerentes no oceano. Eles confirmaram que suas observações ótimas foram de 50 a 150 por cento mais informativas do que uma observação média.

Os cientistas se preparam para carregar um AUV em um navio de pesquisa para um teste de navegação e algoritmos de detecção no mar. Crédito:MSEAS
Para alcançar os locais de observação ideais, Os AUVs devem navegar pelo oceano. Tradicionalmente, o planejamento de caminhos para robôs foi feito em ambientes relativamente estáticos. Mas planejar através do oceano é uma história diferente, já que fortes correntes e redemoinhos podem mudar constantemente, seja incerto, e empurre um veículo para fora de seu curso pré-planejado.
A equipe do MIT, portanto, desenvolveu algoritmos de planejamento de caminho a partir de princípios fundamentais com o oceano em mente. Eles modificaram uma equação existente, conhecida como a equação de Hamilton-Jacobi, para determinar a frente de alcançabilidade de um AUV, ou o perímetro mais distante que um veículo tem garantia de alcançar em um determinado período de tempo. A equação é baseada em três variáveis principais:tempo, as restrições de propulsão específicas de um veículo, e advecção, ou o transporte pelas correntes oceânicas dinâmicas - uma variável que o grupo prevê usando seu modelo oceânico MSEAS.
Com o novo sistema, os AUVs podem mapear os caminhos mais informativos viáveis e adaptar seus planos de amostragem conforme as correntes do oceano incerto mudam com o tempo. Em um primeiro grande, teste em mar aberto, a equipe calculou frentes de alcançabilidade probabilística e os caminhos mais informativos para flutuadores e planadores autônomos no Oceano Índico, como parte da iniciativa de pesquisa autônoma da Circulação do Mar Arábico do Norte (NASCar) do Office of Naval Research (ONR).
Ao longo de vários meses, Os pesquisadores, trabalhando fora de seus escritórios do MIT, forneceu previsões diárias de alcançabilidade para a equipe ONR para ajudar a guiar os veículos subaquáticos, coletando observações ótimas ao longo do caminho.
"Basicamente, não dormi muito, "Lermusiaux lembra." As previsões eram de três a sete dias, e assimilaríamos dados e os atualizaríamos todos os dias. Nós nos saímos muito bem. Na média, os planadores e flutuadores acabaram onde desejados e dentro das áreas probabilísticas que previmos. "
Um momento de verdade compensa
Lermusiaux e seus colegas também utilizaram seus sistemas para planejar "caminhos otimizados no tempo" - trajetórias que levariam um AUV a um determinado local no menor tempo possível, dadas as previsões das condições atuais do oceano.
Com colegas do MIT Lincoln Laboratory e Woods Hole Oceanographic Institution, eles testaram esses caminhos otimizados em tempo real, realizando "corridas" entre AUVs com propulsão idêntica, ao largo da costa de Martha's Vineyard. Em cada corrida, o curso de um AUV foi determinado pelo caminho ideal de tempo da equipe, enquanto outro AUV seguiu um caminho com a distância mais curta para o mesmo destino.
"Estava tenso - quem vai ganhar?" Subramani lembra. "Este foi o momento da verdade para nós, depois de todos aqueles anos de desenvolvimento teórico com equações matemáticas e provas. "
O trabalho da equipe valeu a pena. Em cada corrida, o AUV operando de acordo com a previsão da equipe chegou ao seu destino primeiro, executando cerca de 15 por cento mais rápido do que o AUV concorrente. A previsão da equipe ajudou o AUV vencedor a evitar fortes correntes que às vezes agiam para bloquear o outro AUV.
"Foi fantástico, "Kulkarni diz." Embora fisicamente os dois caminhos estivessem a menos de um quilômetro de distância, seguindo nossas previsões, houve uma redução de 15% nos tempos de viagem. Isso mostra que nossos caminhos são realmente ideais. "
Entre outras aplicações, Lermusiaux, como membro do Tata Center for Technology and Design do MIT, estará aplicando seus métodos de previsão do oceano para ajudar a orientar as observações na costa da Índia, onde os veículos terão a tarefa de monitorar as pescarias para fornecer um sistema de gestão potencialmente de baixo custo.
"Os AUVs não são muito rápidos, e sua autonomia não é infinita, então você realmente tem que levar em consideração as correntes e suas incertezas, e modelar as coisas com rigor, "Lermusiaux diz." A inteligência da máquina para esses sistemas autônomos vem da derivação rigorosa e da fusão de equações diferenciais e princípios governantes com a teoria de controle, teoria da informação, e aprendizado de máquina. "
Esta história foi republicada por cortesia do MIT News (web.mit.edu/newsoffice/), um site popular que cobre notícias sobre pesquisas do MIT, inovação e ensino.