Drones podem ajudar a mapear a superfície lunar com extrema precisão
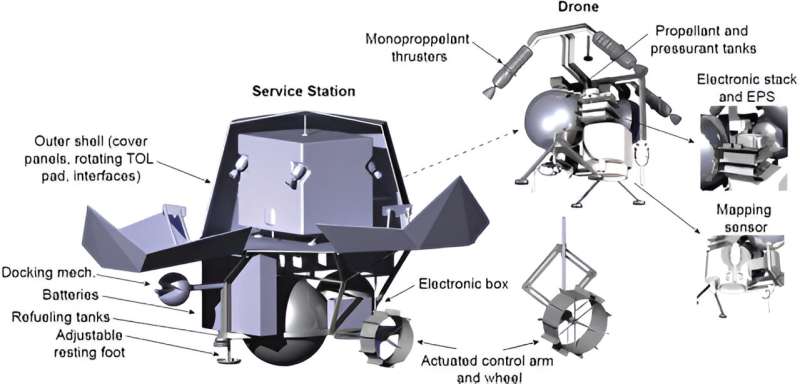
Sistema de drone de reconhecimento lunar. Crédito:Ronasso et al. A exploração da Lua tornou-se cada vez mais um ponto focal ultimamente, especialmente com uma série de sondas lançadas recentemente com vários graus de sucesso. Uma das dificuldades que esses módulos de pouso e quaisquer futuras missões humanas enfrentam é compreender o terreno em que estão pousando e potencialmente atravessando, no caso de um veículo espacial ou humano. Para ajudar a combater este problema, uma equipa de investigadores da Suíça desenvolveu um conceito de drone que poderá ajudar a mapear algumas das áreas mais interessantes e potencialmente perigosas para explorar na Lua.
Mapear a Lua já é uma prioridade há anos. No entanto, algumas das regiões mais interessantes, como as Regiões de Sombras Permanentes (PSR) nos pólos lunares que contêm uma quantidade significativa de gelo de água, só foram mapeadas com uma resolução de cerca de 1 m por pixel nas melhores imagens delas. Isso inclui aprimoramento artificial por algoritmos apoiados por IA.
Esse nível de resolução não é suficientemente próximo para fornecer dados de planeamento úteis para qualquer potencial rover ou missão humana – a roda de um determinado rover em si não terá ainda mais largura, e muito menos espera atravessar um obstáculo desse tamanho. Consequentemente, quaisquer rovers que enviarmos devem ser controlados manualmente ou percorrer o seu caminho de forma muito lenta e autónoma. Dado o cronograma operacional limitado destas missões de rover esperadas, esse ritmo lento poderia limitar a sua capacidade de procurar os recursos e locais valiosos que os cientistas pensam estar escondidos nos PSRs.
A solução óbvia para este problema é ter outra forma de robô servindo como batedor, semelhante ao que o Ingenuity vinha fazendo para o rover Perseverance em Marte até recentemente. Essa colaboração permitiu ao Perseverance estabelecer o recorde de viagem autônoma mais longa em um único dia em outro planeta – totalizando cerca de 700 m. Se um batedor fosse capaz de mapear detalhes da superfície lunar na frente de um potencial rover, ele poderia se mover ainda mais rápido do que o ritmo estabelecido pelo Perseverance. Crédito:Universe Today Para este fim, houve muitas missões planejadas para fazer exatamente isso. Em um artigo recente publicado na Acta Astronautica ao descrever a sua ideia, Romeo Tonasso e os seus colegas da École Polytechnique Federale de Lausanne dividiram estes conceitos de missão existentes em duas categorias – grandes e pequenas.
Sistemas maiores podem conter sistemas de propulsão química testados e prontos para uso que, quando testados em voo, podem ser volumosos e usar produtos químicos potencialmente perigosos. Sistemas menores poderiam usar diferentes formas de propulsão química, como H2 O2 foguetes, ou meios de locomoção ainda mais mundanos, como literalmente pular do chão usando as pernas. No entanto, muitas das tecnologias para esse tipo de propulsão ainda não estão num nível de desenvolvimento suficientemente elevado para serem utilizadas numa missão prática.
Encontrar um meio-termo entre o modelo de tremonha mais antigo e mais pesado e o modelo mais novo e não testado foi uma das principais restrições de design para o novo conceito. A solução que encontraram foi um drone com propulsão de foguete que seria lançado e retornaria a uma estação base que poderia ser rebocado por um veículo espacial ou outro veículo de exploração lunar.
A estação base reabasteceria o drone após cada voo, permitindo-lhe realizar vários voos sem carregar excesso de peso do propelente. Com esta configuração, o sistema poderia mapear até 9 quilómetros quadrados da superfície lunar com uma resolução que seria útil tanto para o planeamento de missões espaciais como humanas. No final desse esforço, a estação base teria de ser reabastecida, permitindo-lhe continuar a sua missão, que é uma parte central do conceito de design.
Esta ideia tem outras vantagens:muitos outros hoppers têm de aterrar no solo e o seu sistema de propulsão pode introduzir uma quantidade significativa de caos no ambiente lunar. Isso é especialmente indesejável se a superfície em que pousam contiver materiais comercialmente viáveis, como gelo de água. Aterrissar de volta em uma estação de acoplamento móvel também elimina qualquer acúmulo de poeira, o que pode prejudicar significativamente as operações em uma área, dado o tempo que a poeira leva para assentar na lua.
Embora existam alguns detalhes no artigo, incluindo algumas discussões de alto nível sobre arquitetura que usa hardware testado em espaço, até agora essa ideia é apenas um conceito. No entanto, com a data da aterragem humana do Artemis III a aproximar-se rapidamente, a NASA e outras agências espaciais beneficiariam, sem dúvida, de uma missão de reconhecimento bem-sucedida como a descrita no artigo. Se eles levarão ou não a ideia até a linha de chegada, ainda não se sabe.
Mais informações: Roméo Tonasso et al, Um drone de reconhecimento lunar para exploração cooperativa e mapeamento de alta resolução de locais extremos, Acta Astronautica (2024). DOI:10.1016/j.actaastro.2024.02.006 Fornecido por Universe Today