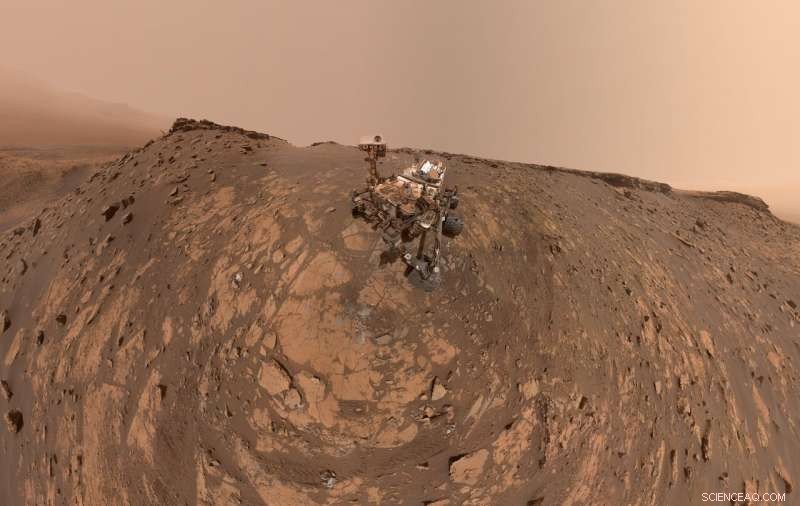
Esta selfie foi tirada pelo rover Curiosity Mars da NASA em 26 de fevereiro 2020 (o 2, 687º dia marciano, ou sol, da missão). A camada de rocha em ruínas no topo da imagem é "o Frontão de Greenheugh, "que o Curiosity escalou logo após tirar a imagem. Crédito:NASA / JPL-Caltech / MSSS
O rover Curiosity Mars da NASA recentemente estabeleceu um recorde para o terreno mais íngreme que já escalou, no topo do "Frontão Greenheugh, "uma larga folha de rocha que fica no topo de uma colina. E antes de fazer isso, o rover tirou uma selfie, capturando a cena logo abaixo de Greenheugh.
Na frente do rover há um buraco que ele perfurou durante a amostragem de um alvo rochoso chamado "Hutton". A selfie inteira é um panorama de 360 graus costurado a partir de 86 imagens retransmitidas para a Terra. A selfie captura o rover cerca de 3,4 metros abaixo do ponto onde ele escalou o frontão em ruínas.
p A curiosidade finalmente atingiu o topo da encosta em 6 de março (dia 2, 696º dia marciano, ou sol, da missão). Demorou três viagens para escalar a colina, o segundo dos quais inclinou o rover 31 graus - o máximo que o rover já inclinou em Marte e apenas tímido em relação ao recorde de inclinação de 32 graus do rover Opportunity, agora inativo, ambientado em 2016. A curiosidade tirou a selfie em 26 de fevereiro 2020 (Sol 2687).Desde 2014, A curiosidade tem rolado pelo Monte Sharp, uma montanha de 5 quilômetros de altura no centro da cratera Gale. Operadores de Rover no Laboratório de Propulsão a Jato da NASA, no sul da Califórnia, mapeiam cuidadosamente cada percurso para garantir que o Curiosity seja seguro. O rover nunca corre o risco de se inclinar tanto a ponto de capotar - o sistema de roda do rocker-bogie do Curiosity permite que ele se incline até 45 graus com segurança - mas os avanços íngremes fazem com que as rodas girem no lugar.
Como as selfies são tiradas?
p Antes da escalada, A Curiosity usou as câmeras de navegação em preto e branco localizadas em seu mastro para, pela primeira vez, gravar um pequeno filme de seu "bastão de selfie, "também conhecido como braço robótico.A missão do Curiosity é estudar se o ambiente marciano poderia ter sustentado vida microbiana há bilhões de anos. Uma ferramenta para fazer isso é a Mars Hand Lens Camera, ou MAHLI, localizado na torre no final do braço robótico. Esta câmera oferece uma visão de perto de grãos de areia e texturas de rocha, da mesma forma que um geólogo usa uma lupa portátil para ver mais de perto o campo na Terra.
Girando a torre para enfrentar o rover, a equipe pode usar MAHLI para mostrar Curiosidade. Como cada imagem MAHLI cobre apenas uma pequena área, requer muitas imagens e posições do braço para capturar totalmente o rover e seus arredores.
"Muitas vezes nos perguntam como o Curiosity tira uma selfie, "disse Doug Ellison, operador de câmera Curiosity no JPL. "Achamos que a melhor maneira de explicar seria deixar o rover mostrar a todos, de seu próprio ponto de vista, como ele é feito."