O software em Mars rover permite que ele escolha alvos de pesquisa de forma autônoma
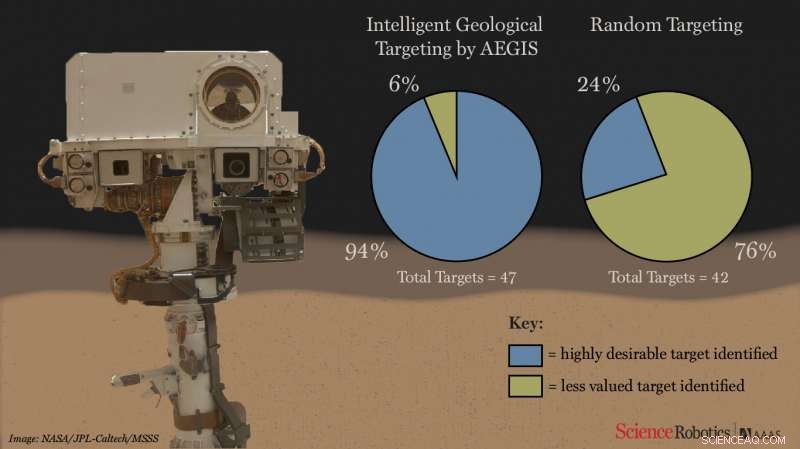 p Levando apenas 21, 000 do total de 3,8 milhões de linhas de código da missão Curiosity, AEGIS selecionou com precisão os alvos desejados em 2,5 quilômetros de terreno marciano inexplorado 93% do tempo, em comparação com os 24% esperados sem o software. Nesse caso, o alvo desejado era o afloramento, um tipo de rocha marciana ideal para analisar a história geológica do planeta vermelho. Crédito:Carla Schaffer / AAAS
p Levando apenas 21, 000 do total de 3,8 milhões de linhas de código da missão Curiosity, AEGIS selecionou com precisão os alvos desejados em 2,5 quilômetros de terreno marciano inexplorado 93% do tempo, em comparação com os 24% esperados sem o software. Nesse caso, o alvo desejado era o afloramento, um tipo de rocha marciana ideal para analisar a história geológica do planeta vermelho. Crédito:Carla Schaffer / AAAS
p (Phys.org) —Uma equipe de pesquisadores dos EUA, A Dinamarca e a França elaboraram um relatório sobre a criação e uso de software com o objetivo de dar mais autonomia aos robôs exploratórios no espaço. Em seu artigo publicado na revista
Ciência Robótica , a equipe descreve o software, chamado Exploração Autônoma para Coleta de Ciência Aumentada (AEGIS), e o desempenho dele no Mars rover Curiosity. p Por causa de seu poder de computação limitado e distância da Terra, cientistas espaciais acreditam que seria vantajoso para robôs exploratórios terem a habilidade de selecionar quais coisas estudar. Também permitiria que mais pesquisas sejam feitas quando um robô não for capaz de se comunicar com a Terra, como quando está na face oposta de um planeta. Sem tal sistema, um robô teria que escanear uma região, fotografar, envie as imagens fotográficas de volta para a Terra e aguarde as instruções sobre o que fazer. Com tal sistema, um robô como o Curiosity poderia varrer o horizonte, escolha um objeto para estudar e então dirija e estude-o. Essa abordagem economizaria muito tempo, permitindo que o robô estude mais objetos antes que sua vida útil expire. Por causa disso, A NASA contratou uma equipe para criar esse software, que eventualmente se tornou AEGIS. O software foi testado e carregado no Curiosity em maio de 2016 e foi usado 54 vezes nos 11 meses seguintes.
p O software permite que o rover controle o que foi apelidado de ChemCam, que é um dispositivo usado para estudar rochas ou outras características geológicas - um laser é disparado contra um alvo e os sensores medem os gases que ocorrem como resultado.
Uma representação animada do rover Mars Curiosity. Seu software AEGIS direciona ChemCam para alvos geológicos desejados a laser. Crédito:NASA / JPL-Caltech p Os pesquisadores relatam que descobriram que o sistema tem 93 por cento de precisão, em comparação com 24 por cento sem seu uso. O software, eles afirmam, economizou muitas horas de tempo de missão, que foi usado para se envolver em outras atividades úteis, como estudar o conteúdo de meteoritos. Eles também relatam que o software permitiu um aumento na segmentação da ChemCam de 256 para 327 por dia, o que significa que mais dados foram coletados no mesmo período de tempo.
-
 p (A) O olhar ChemCam. (B) ChemCam atira lasers em rochas para analisar seu conteúdo, deixando marcas visíveis na superfície (canto superior direito) e dentro do orifício de perfuração de 16 mm de diâmetro (centro) deste local de perfuração “Windjana”. (C) Alvos de solo medidos pela ChemCam. (D) O Remote Micro-Imager na ChemCam tira fotos de alto foco de alvos distantes, como esta área no leque aluvial Peace Vallis, aproximadamente 25 km de distância. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
p (A) O olhar ChemCam. (B) ChemCam atira lasers em rochas para analisar seu conteúdo, deixando marcas visíveis na superfície (canto superior direito) e dentro do orifício de perfuração de 16 mm de diâmetro (centro) deste local de perfuração “Windjana”. (C) Alvos de solo medidos pela ChemCam. (D) O Remote Micro-Imager na ChemCam tira fotos de alto foco de alvos distantes, como esta área no leque aluvial Peace Vallis, aproximadamente 25 km de distância. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
-
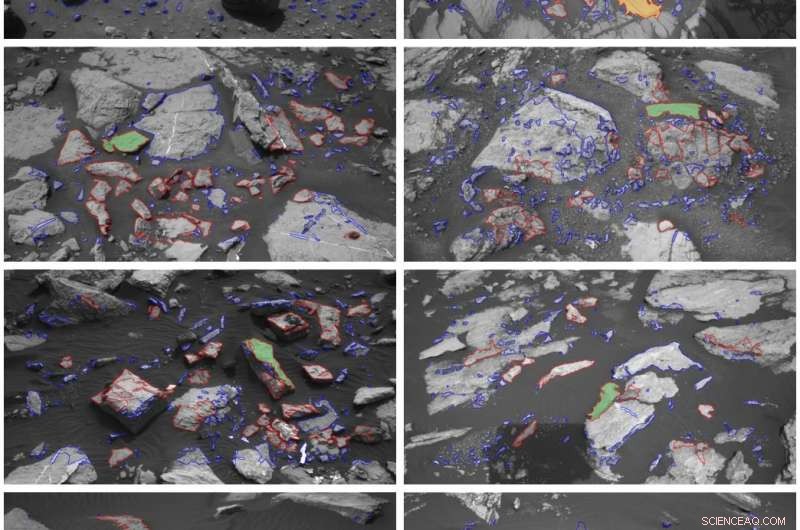 p Exemplos de seleção de alvos AEGIS, coletados do dia marciano de 1400 a 1660. Os alvos delineados em azul foram rejeitados; aqueles destacados em vermelho foram mantidos. Os alvos com melhor classificação são sombreados em verde, e os alvos da segunda classificação são sombreados em laranja. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
p Exemplos de seleção de alvos AEGIS, coletados do dia marciano de 1400 a 1660. Os alvos delineados em azul foram rejeitados; aqueles destacados em vermelho foram mantidos. Os alvos com melhor classificação são sombreados em verde, e os alvos da segunda classificação são sombreados em laranja. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
-
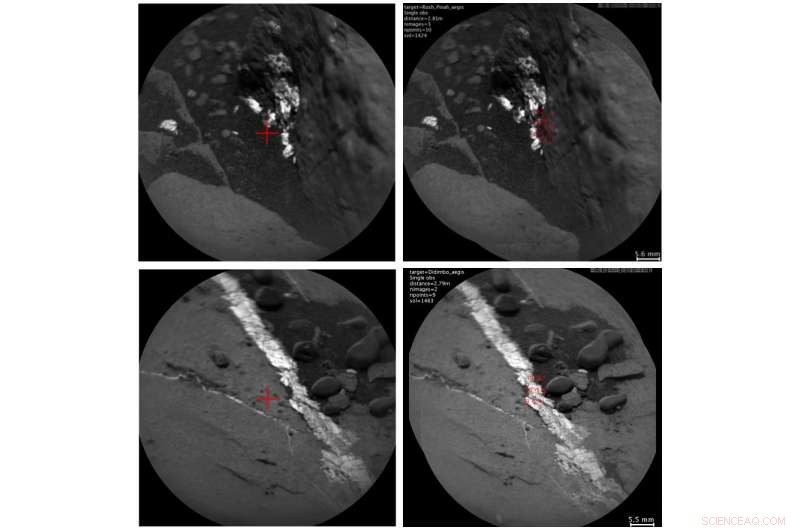 p Exemplos de AEGIS corrigindo comandos humanos que erram o alvo, chamado de "refinamento de apontamento autônomo". (UMA, C) Alvos calculados por humanos em vermelho. (B, D) Refinamento do alvo por AEGIS indicado em vermelho. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
p Exemplos de AEGIS corrigindo comandos humanos que erram o alvo, chamado de "refinamento de apontamento autônomo". (UMA, C) Alvos calculados por humanos em vermelho. (B, D) Refinamento do alvo por AEGIS indicado em vermelho. Crédito:Francis et al., Sci. Robô. 2, eaan4582 (2017)
p © 2017 Phys.org