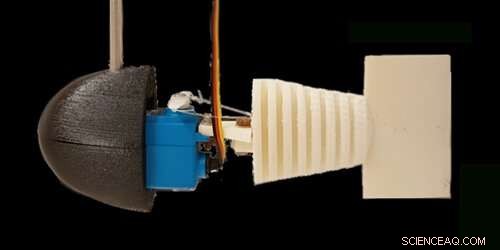
Unidade robótica simples dos pesquisadores. O material branco é impresso em 3D usando polímeros deformáveis. Um servomotor (azul) aciona dois cabos que proporcionam a deformação do robô. A parte escura é impressa em 3D em um material sólido. Crédito:Sanchez-Rodriguez et al.
Nas ultimas decadas, os roboticistas desenvolveram uma variedade de robôs inspirados na natureza, humanos e animais. Para imitar efetivamente animais ou humanos, Contudo, esses robôs não devem apenas se parecer com eles; eles também devem se mover de maneiras semelhantes.
Pesquisadores da Université Côte d'Azur-CNRS introduziram recentemente um novo mecanismo bioinspirado para conseguir nadar como os peixes em robôs. Este mecanismo, introduzido em um artigo publicado em Cartas de revisão física , é baseado no que é conhecido como propriocepção, a capacidade dos animais de coletar informações sobre a posição de seus corpos, movimento e aceleração.
"Com meus colegas M. Gazzola e L. Mahadevan, descobrimos uma lei geral que prevê a velocidade de nadadores subaquáticos macroscópicos em função da marcha de natação, ou seja, a amplitude e a frequência do golpe da nadadeira / cauda, "Mederic Argentina, um dos pesquisadores que realizou o estudo, contado Phys.org . "Nosso trabalho forneceu uma explicação racional desta lei de escala que funcionou em nadadores de alguns centímetros de comprimento até os maiores animais, como as baleias azuis (30m). "
Para testar seu modelo, os pesquisadores queriam coletar dados cinemáticos da ondulação da cauda, que ainda não foi medido em animais vivos. Além disso, eles estavam curiosos para entender quais mecanismos permitem que um determinado nadador selecione a amplitude e a frequência do movimento de sua cauda. Para alcançar isto, eles construíram um pequeno robô compatível com um corpo que pode se deformar biomimeticamente.
"Esta plataforma robótica nos permitiu validar nossa lei de escala, mas também para explorar cenários para a seleção da cinemática de ondulação, "Argentina disse." Parecia natural que a propriocepção fosse um excelente candidato, pois é um sentido (às vezes chamado de sexto sentido) que avalia a deformação do corpo, sua aceleração ou a força sentida. Em nosso artigo recente, questionamos se um loop de feedback controlado pela propriocepção poderia desencadear a locomoção e nosso trabalho demonstrou que, de fato, os sensores proprioceptivos podem induzir uma natação agradável e estável. "
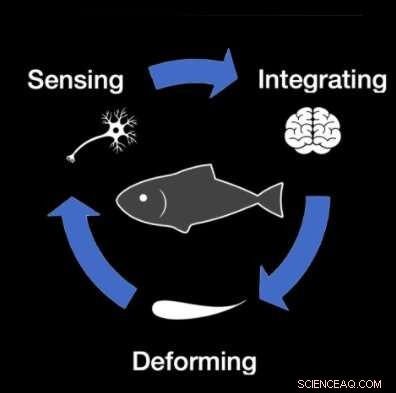
Crédito:Sanchez-Rodriguez et al.
A principal vantagem do mecanismo proprioceptivo introduzido pela Argentina e seus colegas é que ele permite que nadadores robóticos adaptem sua ondulação ao ambiente circundante, assim como muitos peixes. Na verdade, a maioria dos peixes tem linhas laterais que podem medir a pressão do fluido em seu corpo, permitindo-lhes integrar os sentidos proprioceptivos.
"Nossa ideia era explorar o feedback da força sentida do robô para a deformação da cauda, "Argentina disse." Esta abordagem é simples, robusta e pode explicar a seleção dos modos de natação. "
Os pesquisadores testaram o mecanismo proprioceptivo que desenvolveram em um robô biomimético real, comparando seu desempenho com o obtido ao utilizar um modelo genérico de natação robótica. Suas descobertas foram altamente promissoras, já que seu mecanismo se compara favoravelmente com o modelo genérico e permite nadar como um peixe no robô.
"A propriocepção também pode ser o primeiro passo para criar robôs ondulantes que ajustam automaticamente sua cinemática ao ambiente, "Nosso trabalho demonstrou que este simples acoplamento de propriocepção ao movimento da cauda pode desencadear uma instabilidade que faz a cauda ondular e empurra o nadador."
No futuro, o mecanismo proprioceptivo idealizado por esta equipe de pesquisadores pode permitir o desenvolvimento de robôs aquáticos que se movam com mais eficácia na água. Enquanto isso, A Argentina e seus colegas continuarão a trabalhar em seu robô para aprimorar suas capacidades.
"Atualmente, estamos ensinando o robô a nadar usando técnicas de aprendizado de máquina, "Argentina disse." Nossos primeiros resultados nos dão muita confiança de que devemos ser capazes de construir / projetar robôs ondulantes que nadam usando IA. "
© 2021 Science X Network