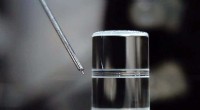
Pesquisadores na China demonstraram um mecanismo robótico de preensão que imita como uma anêmona do mar pega sua presa. O toro biônico captura e libera objetos franzindo sua pele. A pinça não só é relativamente barata e fácil de produzir, mas também pode pegar uma variedade de objetos de tamanhos diferentes, formas, pesos e materiais. Eles discutem seu trabalho nas Cartas de Física Aplicada desta semana. Esta imagem mostra um protótipo simples mostrando a adaptabilidade da pinça a vários objetos. Crédito:Weifeng Yuan
A maioria dos mecanismos robóticos de preensão até agora contam com dedos ou apêndices semelhantes aos humanos, que às vezes se esforçam para fornecer o toque fino, flexibilidade ou relação custo-benefício necessária em algumas circunstâncias para segurar os objetos. Um trabalho recente procura fornecer um caminho a seguir para agarrar robôs de uma origem improvável - a anêmona do mar em forma de rosquinha.
Pesquisadores da Southwest University of Science and Technology e da Tsinghua University, na China, demonstraram um mecanismo robótico de preensão que imita o modo como uma anêmona do mar captura sua presa. O toro biônico captura e libera objetos franzindo sua pele. A pinça não só é relativamente barata e fácil de produzir, mas também pode pegar uma variedade de objetos de tamanhos diferentes, formas, pesos e materiais. Eles discutem seu trabalho no Cartas de Física Aplicada .
"Nas indústrias, mãos hábeis com vários dedos são amplamente utilizadas para realizar tarefas de agarrar. Contudo, esses efetores finais consistem em um grande número de componentes, como juntas e sensores, que são difíceis de controlar, "disse o autor Weifeng Yuan.
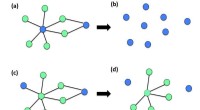
A pele de borracha termoplástica que reveste o exterior do anel cheio de líquido rola para dentro quando a pele interna da garra experimenta uma força de tração, sugando em qualquer alvo sendo agarrado.
Os pesquisadores podem ajustar vários recursos do toro, como a direção do rolamento e o comprimento da pele, para controlar se os itens são engolfados, engolido ou liberado.
"Descobrimos que as anêmonas do mar podem capturar criaturas marinhas com diferentes formas e tamanhos, então decidimos investigar o mecanismo da estratégia de predação, e acreditamos que o estudo seria útil para o projeto de agarradores suaves adaptativos, "Yuan disse.
O grupo demonstrou o dispositivo prendendo-se a objetos, variando de um pedaço de pano a um telefone celular e um copo de vidro cheio de líquido.
Yuan disse que uma garra flexível tem o potencial de agarrar objetos frágeis em espaços estreitos ou extremos, ambientes de alta pressão, como a coleta de amostras de organismos do fundo do mar ou tubos de transporte. O que mais, a pinça também pode ser construída em nanoescala para manipular células individuais. Yuan vê potencial no desenvolvimento de instrumentos cirúrgicos.
"Nosso agarrador pode agarrar uma barra de aço de uma mesa em um minuto e um ovo de uma cesta no minuto seguinte, sem redefinir os parâmetros de controle, "Yuan disse.
O grupo espera continuar a desenvolver o potencial de um dispositivo tão único, como o aumento da relação força-peso usando ar em vez de líquidos.