 p Crédito:North Carolina State University
p Crédito:North Carolina State University
p Uma equipe de pesquisadores de engenharia fez um avanço fundamental no controle dos chamados robôs soft, usando campos magnéticos para manipular remotamente cadeias de micropartículas incorporadas em dispositivos robóticos macios. Os pesquisadores já criaram vários aparelhos que fazem uso da nova técnica. p "Ao colocar essas correntes automontáveis em robôs macios, podemos fazer com que desempenhem funções mais complexas, ao mesmo tempo que mantemos designs relativamente simples, "diz Joe Tracy, professor associado de ciência de materiais e engenharia na North Carolina State University e autor correspondente de um artigo sobre o trabalho. "As aplicações possíveis para esses dispositivos variam de bombas acionadas remotamente para distribuição de drogas ao desenvolvimento de estruturas implantáveis remotamente."
p A nova técnica baseia-se em trabalhos anteriores no campo da automontagem, compostos magneticamente acionados por Tracy e Orlin Velev, Professor de Engenharia Química e Biomolecular da INVISTA na NC State.
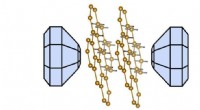
p Para este estudo, os pesquisadores introduziram micropartículas de ferro em uma mistura de polímero líquido e, em seguida, aplicaram um campo magnético para induzir as micropartículas a formar cadeias paralelas. A mistura foi então seca, deixando para trás um filme fino de polímero elástico incorporado com as cadeias alinhadas de partículas magnéticas.
p "As cadeias nos permitem manipular o polímero remotamente como um robô macio, controlando um campo magnético que afeta as cadeias de partículas magnéticas, "Tracy diz.
p Especificamente, a direção do campo magnético e sua intensidade podem ser variadas. As cadeias de micropartículas de ferro respondem alinhando-se e ao polímero circundante na mesma direção do campo magnético aplicado.
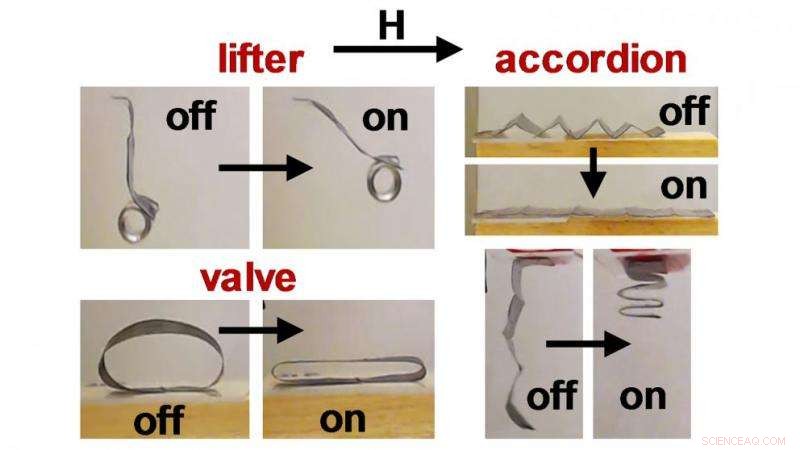
p Usando esta técnica, os pesquisadores criaram três tipos de robôs soft. Um dispositivo é um cantilever que pode levantar até 50 vezes seu próprio peso. O segundo dispositivo é uma estrutura semelhante a um acordeão que se expande e se contrai, imitando o comportamento do músculo. O terceiro dispositivo é um tubo projetado para funcionar como uma bomba peristáltica - uma seção comprimida percorre o comprimento do tubo, muito parecido com alguém espremendo o último pedaço de pasta de dente passando o dedo ao longo do tubo.
p "Agora estamos trabalhando para melhorar o controle e a potência desses dispositivos, para avançar o potencial da robótica leve, "Tracy diz.
p Os pesquisadores também desenvolveram uma métrica para avaliar o desempenho dos elevadores magnéticos, como o dispositivo cantilever.
p "Fazemos isso medindo a quantidade de peso que está sendo levantado e levando em consideração a massa das partículas no levantador e a força do campo magnético que está sendo aplicado, "diz Ben Evans, co-autor do artigo e professor associado de física na Elon University. "Achamos que esta é uma ferramenta útil para pesquisadores nesta área que desejam encontrar uma maneira empírica de comparar o desempenho de diferentes dispositivos."