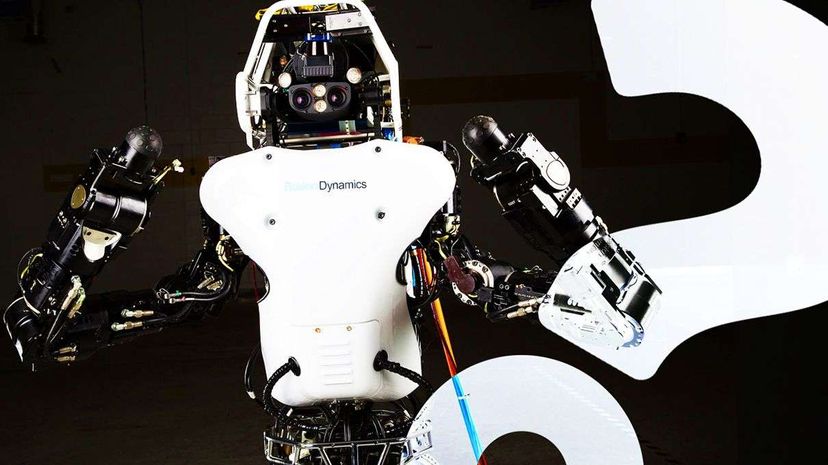
 Boston Dynamics Atlas:um robô bípede com movimentos suaves HowStuffWorks p Em sua nova filmagem de Atlas, Boston Dynamics está fazendo mais do que apenas incomodar um robô:eles estão demonstrando domínio sobre algumas das questões mais difíceis da robótica.
p Manter o equilíbrio nem sempre é fácil para os bípedes humanos. (Jennifer Lawrence, se por acaso você ler isso, nós sentimos você.) Isso apesar de termos uma intrincada, sistema embutido para nos ajudar. Nervos sensíveis à pressão em nossa pele, músculos e articulações nos falam sobre a firmeza e a inclinação do solo. Em nossos ouvidos internos, canais cheios de fluido e minúsculos fios de cabelo nos fornecem nuances detalhadas sobre nossa orientação espacial e movimento 3-D. Nossos olhos absorvem uma quantidade incrível de dados sobre a forma e a distância dos objetos ao nosso redor.
Boston Dynamics Atlas:um robô bípede com movimentos suaves HowStuffWorks p Em sua nova filmagem de Atlas, Boston Dynamics está fazendo mais do que apenas incomodar um robô:eles estão demonstrando domínio sobre algumas das questões mais difíceis da robótica.
p Manter o equilíbrio nem sempre é fácil para os bípedes humanos. (Jennifer Lawrence, se por acaso você ler isso, nós sentimos você.) Isso apesar de termos uma intrincada, sistema embutido para nos ajudar. Nervos sensíveis à pressão em nossa pele, músculos e articulações nos falam sobre a firmeza e a inclinação do solo. Em nossos ouvidos internos, canais cheios de fluido e minúsculos fios de cabelo nos fornecem nuances detalhadas sobre nossa orientação espacial e movimento 3-D. Nossos olhos absorvem uma quantidade incrível de dados sobre a forma e a distância dos objetos ao nosso redor.
p Programar esses sensores em máquinas de duas pernas e, em seguida, fazer com que um computador processe os dados e extrapole os sinais de movimento apropriados em tempo real são façanhas gigantescas. Outros designs são muito mais estáveis:quatro pernas, rodas e degraus superam os bípedes em termos de praticidade do robô. p Então, por que tentar? Boston Dynamics está apenas se exibindo? Nós vamos, talvez um pouco. Mas a maior parte do nosso mundo é construído na suposição de que os seres que interagem com ele terão o tamanho, forma e capacidade da pessoa média. Nós nem mesmo facilitamos para nossos companheiros humanos se locomoverem se seus corpos ou habilidades estiverem fora de uma norma estreita, e definitivamente não levamos em consideração as necessidades dos robôs ao construir nossos espaços. p Para qualquer pequeno, "bot especializado que você pode comprar no futuro, isso provavelmente não importará muito. Suas tarefas serão rotineiras. Mas, como o vídeo acima discute, torna-se um grande problema se vamos perseguir um dos maiores objetivos da robótica:enviar robôs para cenários de alívio de desastres. Existem tantas situações, como a crise de Fukushima, que respondentes humanos não podem sobreviver - e não deveriam ser solicitados. Afinal, vivemos em um futuro incrível em que o verdadeiro trabalho de um cara mexer com um robô. Faz você sentir que tudo é possível, dada graxa de cotovelo e servo-acopladores suficientes.