A inteligência artificial orienta a exploração rápida baseada em dados de habitats subaquáticos
 p AE2000f é o batedor da expedição, irá nadar a cerca de 20km / he coletar imagens preliminares do fundo do mar, para determinar onde o resto dos robôs deve se concentrar. Crédito:Schmidt Ocean Institute
p AE2000f é o batedor da expedição, irá nadar a cerca de 20km / he coletar imagens preliminares do fundo do mar, para determinar onde o resto dos robôs deve se concentrar. Crédito:Schmidt Ocean Institute
p Os pesquisadores a bordo do navio de pesquisa Falkor, do Schmidt Ocean Institute, usaram robôs subaquáticos autônomos, junto com o veículo operado remotamente (ROV) do Instituto SuBastian, adquirir 1,3 milhão de imagens de alta resolução do fundo do mar em Hydrate Ridge, compondo-os no maior modelo 3D em cores de alta resolução conhecido do fundo do mar. Usando algoritmos de agrupamento não supervisionados, eles identificaram hotspots biológicos dinâmicos nos dados de imagem para pesquisas mais detalhadas e amostragem por um veículo operado remotamente. p Uma expedição recente liderada pelo Dr. Blair Thornton, com Professores Associados na University of Southampton e no Institute of Industrial Science, a Universidade de Tóquio, demonstraram como o uso de robótica autônoma e inteligência artificial no mar pode acelerar drasticamente a exploração e o estudo de ecossistemas de alto mar de difícil acesso, como vazamentos de metano intermitentemente ativos. Graças à rápida análise de dados de alto rendimento no mar, foi possível identificar pontos críticos biológicos na região de Hydrate Ridge, na costa de Oregon, rápido o suficiente para pesquisá-los e testá-los, dentro de alguns dias após a pesquisa de imagem de veículos subaquáticos autônomos (AUV). A equipe a bordo do navio de pesquisa
Falkor usou uma forma de Inteligência Artificial, agrupamento não supervisionado, para analisar imagens do fundo do mar adquiridas por AUV e identificar áreas-alvo para levantamentos fotogramétricos AUV mais detalhados e amostragem focada em pontos ativos interativos com ROV SuBastian.
p Este projeto demonstrou como a ciência de dados moderna pode aumentar muito a eficiência da pesquisa convencional no mar, e melhorar a produtividade da exploração interativa do fundo do mar com o modo bastante familiar de "tropeçar no escuro". "O desenvolvimento de fluxos de trabalho operacionais totalmente novos é arriscado, Contudo, é muito relevante para aplicações como monitoramento do fundo do mar, levantamento do ecossistema e planejamento da instalação e desativação da infraestrutura do fundo do mar, "disse Thornton.
p A ideia por trás dessa missão da Robótica Adaptável não era mudar a estrutura de como as coisas são feitas no mar, mas simplesmente para remover gargalos no fluxo de informações e processamento de dados usando métodos computacionais e Inteligência Artificial. Os algoritmos usados são capazes de produzir rapidamente resumos simples de observações, e formar planos de implantação subsequentes. Por aqui, os cientistas podem responder a mudanças dinâmicas no ambiente e áreas-alvo que levarão ao maior funcionamento, científico, ou ganhos de gestão ambiental.
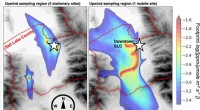
A realização de pesquisas com vários veículos subaquáticos exige uma grande quantidade de deliberação e coordenação, baseadas em dados coletados muito antes de o trabalho ser realizado. Mas o que acontece se o ambiente em que você trabalha muda constantemente? Então, as informações nas quais você está baseando sua pesquisa não estão atualizadas. Adicionalmente, há uma incompatibilidade entre o tempo que leva para digerir os dados coletados e o ciclo diário de implantação da robótica, limitando o quão bem informadas as decisões em campo podem ser ... até agora. Crédito:Schmidt Ocean Institute p Mais de 1,3 milhão de imagens do fundo do mar foram coletadas e analisadas algoritmicamente para encontrar pontos críticos biológicos e direcioná-los com precisão para amostragem e observações interativas. As imagens iniciais de área ampla do fundo do mar foram adquiridas com um veículo subaquático "Ae2000f" usando câmeras de mapeamento visual 3D de alta altitude em locais subaquáticos entre 680 e 780 metros de profundidade. A equipe internacional implantou vários AUVs, desenvolvido pela Universidade de Tóquio, que foram equipados com tecnologia de mapeamento visual 3-D desenvolvida em conjunto pela Universidade de Sydney, Universidade de Southampton, e a Universidade de Tóquio e o Instituto de Tecnologia de Kyushu como parte de uma colaboração internacional.
p A conversão das imagens iniciais de pesquisa de área ampla em mapas tridimensionais do fundo do mar e resumos de tipo de habitat a bordo
Falkor , permitiu aos pesquisadores planejar as implantações robóticas subsequentes para realizar imagens visuais de alta resolução, levantamento ambiental e químico, e amostragem física nas áreas de maior interesse, particularmente nos pontos quentes efêmeros de atividade biológica que se formam intermitentemente em torno de infiltrações transitórias de metano. Dezenove implantações de AUV e quinze mergulhos de ROV foram concluídos no total durante a expedição, incluindo várias operações de vários veículos.
p Graças ao rápido processamento de dados, um mapa fotogramétrico de um dos depósitos de hidrato de gás mais bem estudados foi concluído. Acredita-se que esta seja a maior reconstrução colorida em 3-D do fundo do mar, por área, no mundo, medindo mais de 118, 000 metros quadrados ou 11,8 hectares, e cobrindo uma região de aproximadamente 500 x 350 metros. Embora a resolução média dos mapas obtidos seja de 6 mm, as áreas de maior interesse foram mapeadas com resolução uma ordem de magnitude maior, o que não teria sido possível sem a capacidade de direcionar de forma inteligente os locais de interesse com levantamentos de imagem de alta resolução e processar os grandes volumes de dados adquiridos poucas horas após sua aquisição no mar.
p Normalmente, mapas como este levariam vários meses para serem processados e somente após a conclusão de uma expedição, em que ponto a equipe de ciência não está mais no local, e os habitats podem já ter evoluído ou expirado. Em vez de, a equipe de pesquisa foi capaz de compor os mapas 3-D a bordo do
Falkor dias após a aquisição das imagens. O mapa composto foi usado durante a expedição para planejar as operações, incluindo a recuperação de instrumentos do fundo do mar e foi inestimável para revisitar locais específicos, como plumas de bolhas ativas, tornando toda a operação mais eficiente.
p "É incrível ver áreas tão grandes do fundo do mar mapeadas visualmente, especialmente apenas alguns dias após os dados brutos terem sido coletados. Não é apenas o tamanho do mapa, mas também a maneira como pudemos usá-lo para informar nossas decisões ainda no local. Isso faz uma diferença real, pois a tecnologia torna possível visualizar áreas amplas em resolução muito alta, e também identificar e direcionar facilmente as áreas onde devemos coletar dados. Isso não era possível anteriormente, "disse Thornton.