Crédito:Pixabay/CC0 Public Domain
Pesquisadores do MIT desenvolveram um método para imprimir materiais em 3D com propriedades mecânicas ajustáveis, que podem detectar como eles estão se movendo e interagindo com o ambiente. Os pesquisadores criam essas estruturas de detecção usando apenas um material e uma única execução em uma impressora 3D.
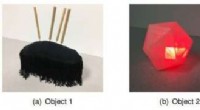
Para conseguir isso, os pesquisadores começaram com materiais de treliça impressos em 3D e incorporaram redes de canais cheios de ar na estrutura durante o processo de impressão. Ao medir como a pressão muda dentro desses canais quando a estrutura é comprimida, dobrada ou esticada, os engenheiros podem receber feedback sobre como o material está se movendo.
Esses materiais de treliça são compostos de células únicas em um padrão de repetição. Alterar o tamanho ou a forma das células altera as propriedades mecânicas do material, como rigidez ou dureza. Por exemplo, uma rede mais densa de células torna uma estrutura mais rígida.
Essa técnica pode um dia ser usada para criar robôs flexíveis e flexíveis com sensores embutidos que permitem que os robôs entendam sua postura e movimentos. Também pode ser usado para produzir dispositivos inteligentes vestíveis, como tênis de corrida personalizados que fornecem feedback sobre como o pé de um atleta está impactando o solo.
"A ideia com este trabalho é que podemos pegar qualquer material que possa ser impresso em 3D e ter uma maneira simples de rotear canais por meio dele para que possamos obter sensorização com estrutura. E se você usar materiais realmente complexos, poderá ter movimento , percepção e estrutura tudo em um", diz a coautora Lillian Chin, estudante de pós-graduação no Laboratório de Ciência da Computação e Inteligência Artificial do MIT (CSAIL).
Juntando-se a Chin no artigo estão o co-autor principal Ryan Truby, um ex-pós-doc do CSAIL que agora é professor assistente na Northwestern University; Annan Zhang, estudante de pós-graduação do CSAIL; e autor sênior Daniela Rus, o Andrew e Erna Viterbi Professor de Engenharia Elétrica e Ciência da Computação e diretor do CSAIL. O artigo é publicado em
Science Advances .
Materiais arquitetados Os pesquisadores concentraram seus esforços em treliças, um tipo de "material arquitetado", que exibe propriedades mecânicas personalizáveis com base apenas em sua geometria. Por exemplo, alterar o tamanho ou a forma das células na rede torna o material mais ou menos flexível.
Embora os materiais arquitetados possam exibir propriedades únicas, a integração de sensores é notoriamente desafiadora. Os engenheiros normalmente devem colocar os sensores do lado de fora, o que é difícil porque a treliça está cheia de buracos, então há pouco material para trabalhar. Além disso, quando os sensores são colocados do lado de fora, eles não estão totalmente integrados ao material e podem ser afetados pelo ruído proveniente dos movimentos de um material macio.
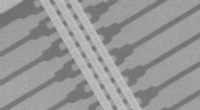
Em vez disso, Chin e seus colaboradores usaram a impressão 3D para incorporar canais cheios de ar diretamente nos suportes que formam a treliça. Quando a estrutura é movida ou comprimida, esses canais se deformam e o volume de ar no interior muda. Os pesquisadores podem medir a mudança correspondente na pressão com um sensor de pressão pronto para uso, que fornece feedback sobre como o material está se deformando.
Por serem incorporados ao material, esses "sensores fluídicos" são mais precisos do que os sensores colocados na parte externa de uma estrutura.
"Se você esticar um elástico, demora um pouco para voltar ao lugar. Mas como estamos usando ar e as deformações são relativamente estáveis, não obtemos essas mesmas propriedades que variam no tempo. A informação que sai do nosso sensor é muito mais limpo", diz Chin.
Estruturas de "sensorização" Os pesquisadores incorporam canais na estrutura usando impressão 3D de processamento de luz digital. Neste método, a estrutura é extraída de uma poça de resina e endurecida em uma forma precisa usando luz projetada. Uma imagem é projetada na resina úmida e as áreas atingidas pela luz são curadas.
Mas à medida que o processo continua, a resina pegajosa tende a pingar e ficar presa dentro dos canais. Os pesquisadores tiveram que trabalhar rapidamente para remover o excesso de resina antes que ela fosse curada, usando uma mistura de ar pressurizado, vácuo e limpeza complexa.
“Teremos que fazer mais brainstorming do lado do design para pensar nesse processo de limpeza, já que é o principal desafio”, diz ela.
Eles usaram esse processo para criar várias estruturas de treliça e demonstraram como os canais cheios de ar geravam um feedback claro quando as estruturas eram comprimidas e dobradas.
Com base nesses resultados, eles também incorporaram sensores em uma nova classe de materiais desenvolvidos para robôs macios motorizados conhecidos como auxéticos de cisalhamento manual, ou HSAs. Os HSAs podem ser torcidos e esticados simultaneamente, o que permite que sejam usados como atuadores robóticos macios eficazes. Mas eles são difíceis de "sensorizar" por causa de suas formas complexas.
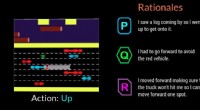
Eles imprimiram em 3D um robô macio HSA capaz de vários movimentos, incluindo flexão, torção e alongamento. Eles executaram o robô por uma série de movimentos por mais de 18 horas e usaram os dados do sensor para treinar uma rede neural que poderia prever com precisão o movimento do robô.
Chin ficou impressionada com os resultados – os sensores fluídicos eram tão precisos que ela teve dificuldade em distinguir entre os sinais que os pesquisadores enviaram aos motores e os dados que vieram dos sensores.
"Cientistas de materiais têm trabalhado arduamente para otimizar materiais arquitetados para funcionalidade. Esta parece ser uma ideia simples, mas realmente poderosa para conectar o que esses pesquisadores estão fazendo com esse reino de percepção. Assim que adicionamos sensores, então roboticistas como eu podem venha e use isso como um material ativo, não apenas passivo", diz ela.
"Sensorizar robôs macios com sensores contínuos semelhantes à pele tem sido um desafio aberto no campo. Este novo método fornece recursos proprioceptivos precisos para robôs macios e abre as portas para explorar o mundo através do toque", diz Rus.
No futuro, Chin espera encontrar novas aplicações para essa técnica, como a criação de capacetes de futebol sob medida para a cabeça de um jogador específico que tenha capacidades de detecção dentro da estrutura interna. Isso pode aumentar a precisão do feedback de colisões em campo e melhorar a segurança do jogador. Ela também está interessada em utilizar o aprendizado de máquina para ampliar os limites da detecção tátil para a robótica.
+ Explorar mais Sensor flexível poroso versátil preparado por ionogel impresso em 3D fotocurável