Observe pequenos robôs eletromecânicos que são mais rápidos que guepardos por seu tamanho
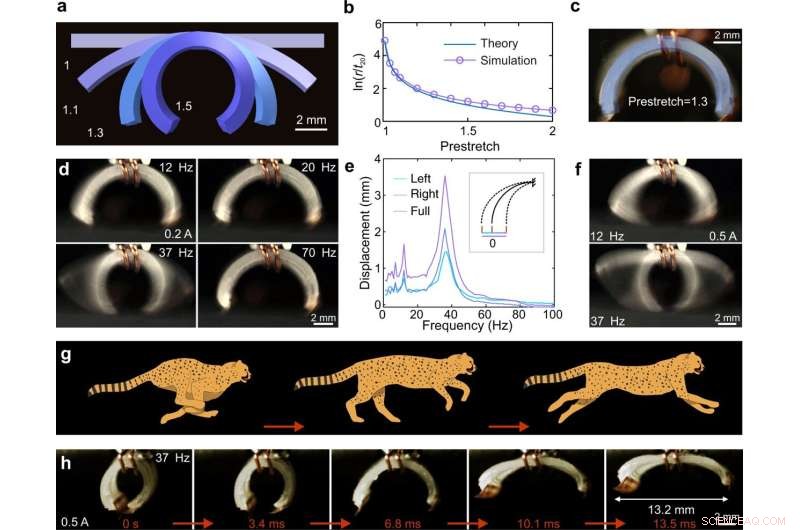
Desenho e caracterização de SEMRs de pequena escala. a Forma simulada do filme bicamada com diferentes pré-estiramentos:1,0, 1,1, 1,3 e 1,5. b Raio simulado e calculado do filme bicamada em função do pré-estiramento aplicado. c Imagens sobrepostas das formas SEMR experimentais e simuladas (vista lateral) com pré-estiramento de 1,3. d Instantâneos das vibrações SEMR para corrente de onda quadrada de 0,2 A com diferentes frequências (Filme Suplementar 2). Os quadros de 37 Hz e 12 Hz correspondem ao principal e ao segundo maior máximo espectral, que pode ser visto em e. e Deslocamento horizontal do pé esquerdo do robô submetido a uma corrente de onda quadrada de 0,2 A em diferentes frequências (Filme Suplementar 2). O robô é montado no topo de um ímã e preso no meio com fios de cobre. A inserção ilustra três deslocamentos (Esquerda, Direita e Completa). Correspondem ao deslocamento máximo da posição de referência “0” (sem corrente) para a esquerda (extensão), direita (contração) e sua soma, respectivamente. A curva superior (Full) mostra toda a amplitude do deslocamento do pé. f Quadros do teste de vibração para correntes de onda quadrada de 0,5 A em frequências de 12 Hz e 37 Hz (Filme Suplementar 2) ilustram a amplitude de movimento para longe e perto da frequência de ressonância. g Ilustração representando uma chita correndo. h Instantâneos do vídeo da câmera de alta velocidade (Filme Suplementar 2), que mostram estágios do movimento do robô impulsionado por uma corrente de onda quadrada (0,5 A, 37 Hz). Crédito:Comunicação da Natureza (2022). DOI:10.1038/s41467-022-32123-4
Uma equipe de pesquisadores da Universidade Johannes Kepler, na Áustria, desenvolveu uma série de pequenos robôs eletromecânicos dirigíveis que podem andar, correr, pular e nadar em alta velocidade para seu tamanho. Em seu artigo publicado na revista
Nature Communications, o grupo descreve como eles construíram seus robôs e sugere possíveis usos para eles.
Como observam os pesquisadores, muitos animais podem se mover rapidamente – chitas, por exemplo, ou gazelas. Essas características evoluíram para ajudar os animais a capturar presas ou iludir a captura por predadores. A criação de robôs com capacidades de velocidade semelhantes tem sido um objetivo dos cientistas há muitos anos, mas alcançá-lo provou ser difícil. Nesse novo esforço, os pesquisadores construíram uma série de robôs usando atuadores eletromagnéticos macios e minúsculos com bobinas de metal líquido incorporadas que são rápidas para seu tamanho.
Para fabricar seus robôs, os pesquisadores imprimiram bobinas de metal líquido em diferentes substratos que tinham características desejáveis diferentes, como dobrabilidade. As bobinas foram impressas de uma maneira que permitiria que diferentes partes do substrato fossem manipuladas da maneira desejada – dobrar apenas uma parte, por exemplo, poderia permitir que um back-end balançasse como um rabo ao nadar como um peixe. Dobrar outras partes permitiu andar, pular e dirigir. Os pesquisadores também adicionaram outros elementos para melhorar o desempenho, como dente de serra ou pés em forma de L. Todos os robôs foram controlados usando um campo magnético e alimentados por um cabo ou bateria.
Crédito:Guoyong Mao et al, Robôs eletromagnéticos ultrarrápidos de pequena escala, Nature Communications (2022). DOI:10.1038/s41467-022-32123-4 Os pesquisadores usaram comprimentos de corpo por segundo (BL/s), o que permite comparações não apenas com outros pequenos robôs, mas com robôs de todos os tamanhos e até animais. Um carro de corrida de fórmula I, por exemplo, pode se mover a aproximadamente 50 BL/s.
Ao testar seus robôs, os pesquisadores descobriram que seu robô de corrida amarrado do tamanho de um selo postal poderia se mover a aproximadamente 70 BL/s em sua melhor superfície e aproximadamente 35 BL/s em superfícies arbitrárias – seu robô não amarrado, carregado com uma bateria, só conseguiu 2,1 BL/s. Eles também descobriram que seu robô de natação amarrado poderia nadar a aproximadamente 4,8 BL/s. Para colocar os resultados em perspectiva, uma chita corre entre 20 e 30 BL/s.
+ Explorar mais Pequeno robô em forma de peixe 'nada' ao redor pegando microplásticos
© 2022 Science X Network