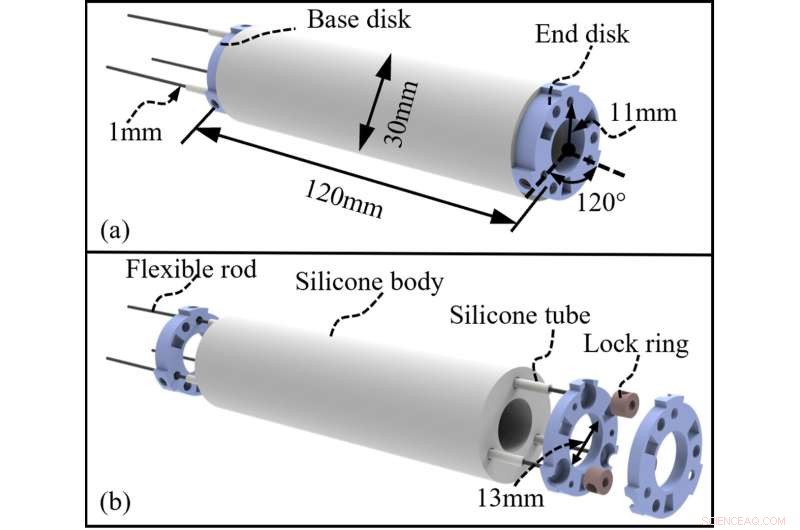
Estrutura do braço macio acionado por haste. (a) Visão geral do projeto. (b) Vista explodida. Crédito:Wang et al.
Robôs macios que podem completar tarefas com alta eficiência, exatidão e precisão podem ter inúmeras aplicações valiosas. Por exemplo, eles podem ser introduzidos em ambientes médicos, ajudando médicos a realizar procedimentos cirúrgicos complexos ou auxiliando pacientes idosos e vulneráveis durante a reabilitação.
Robôs macios são mais flexíveis e podem deformar mais. Isso pode resultar em um aumento da destreza (ou seja, melhores habilidades manuais ao concluir tarefas), bem como em uma redução da carga útil (ou seja, a capacidade do robô de transportar uma carga), porque eles podem produzir forças menores do que os sistemas robóticos rígidos
Pesquisadores da Universidade Nacional de Cingapura e da Universidade Jiaotong de Pequim desenvolveram recentemente um novo robô macio acionado por haste (RDSR) que opera por meio de movimentos de empurrar e puxar. Este robô, apresentado em um artigo publicado no
IEEE Robotics and Automation Letters , combina os mecanismos de dois sistemas robóticos previamente criados por membros do grupo de pesquisa.
“Um desempenho bem equilibrado em termos de destreza, precisão e carga útil pode ter um grande potencial em aplicações de robôs macios”, disse Cecilia Laschi, uma das pesquisadoras que realizaram o estudo, ao TechXplore. "Muitos estudos estão focando nessa área e alguns trabalhos e conquistas anteriores nos inspiraram. Por exemplo, em uma pesquisa pioneira publicada na revista Materials Science and Engineering, desenvolvemos um robô macio inspirado no polvo, impulsionado por tendões longitudinais e transversais, da mesma forma aos músculos do polvo."
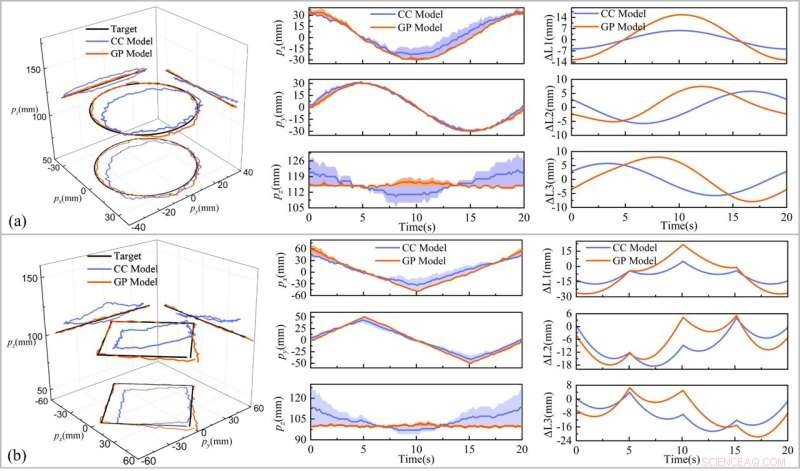
Desempenho de rastreamento de trajetória do controle de malha aberta baseado no modelo CC e GP. (a) Caso para caminho circular. (b) Caso para caminho quadrado. Crédito:Wang et al.
O robô anterior criado por Laschi e seus colegas do Instituto BioRobotics da Scuola Superiore Sant'Anna, na Itália, pode imitar a maneira como um polvo se move alongando, encurtando e dobrando seus tentáculos. Seu sistema recém-desenvolvido pode ser particularmente promissor para completar missões em espaços confinados, como limpezas ou explorações, acessar cavidades profundas e intervir dentro do corpo humano.
"O segundo estudo que inspirou nosso trabalho recente foi o desenvolvimento da minha equipe de pesquisa de um robô contínuo baseado em hastes flexíveis push-pull", explicou Peiyi Wang, outro pesquisador envolvido no estudo. “Ao combinar o corpo macio puro do nosso sistema inspirado em polvo e o braço acionado por haste do robô de Wang, nosso novo robô visa alcançar um desempenho equilibrado em precisão de movimento, espaço de trabalho, DOF, rigidez e força de saída ativa”.
O novo robô criado por Laschi, Wang e seus colegas consiste em um corpo macio de silicone, uma base rígida, discos de extremidade e três tubos de silício que hospedam uma haste flexível à base de Nitinol (NiTi) cada. O corpo de silicone, integrado entre a base e o disco final, é muito macio e flexível, podendo ser facilmente alongado, encurtado e dobrado.
“Cada uma das hastes flexíveis do nosso sistema pode ser controlada nas direções de empurrar e puxar, o que é diferente dos tendões com apenas ação de puxar”, disse Wang. "O robô macio acionado por haste (RDSR) pode então realizar vários movimentos em qualquer direção (vários DOFs), através do controle coordenado de três hastes push-pull."
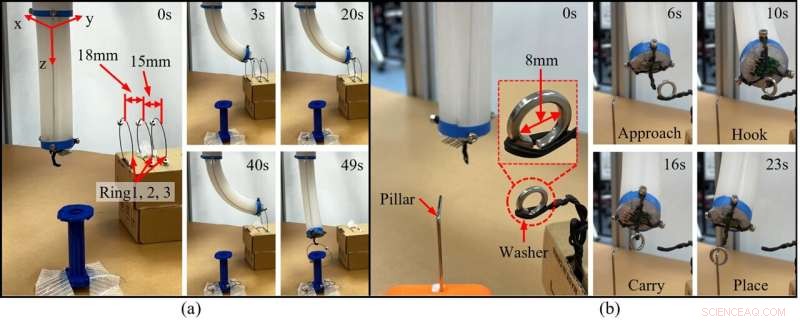
Manipulações de objetos realizadas pelo nosso robô macio. O RDSR concluiu tarefas de pick-and-place com operação precisa em grande área de trabalho. (a) Os objetos foram colocados perto do limite da área de trabalho (tarefa1). (b) Um objeto com um pequeno diâmetro de 8mm foi colocado (tarefa2). Crédito:Wang et al.
Os pesquisadores avaliaram seu RDSR em uma série de testes, comparando seu desempenho ao de um robô macio acionado por tendão à base de silicone (TDSR). Eles descobriram que seu novo sistema robótico era mais rígido e poderia operar em um espaço de trabalho mais amplo (de 2,6 a 5,2 vezes maior).
Em contraste com o TDSR, eles também o compararam, seu robô pode aplicar ativamente forças perpendiculares em um plano inclinado e também pode concluir tarefas que envolvem manipulação de objetos. Combinados, todos esses achados sugerem que o novo robô pode ser mais eficaz na conclusão de tarefas que envolvem pegar e colocar objetos em espaços maiores e com altos níveis de precisão.
"O movimento obtido com acionamento bidirecional push-pull é original", disse Laschi. "Dá ao robô macio um controle mais preciso. Uma implicação notável de nosso trabalho é seu potencial para permitir um desempenho equilibrado em termos de destreza, precisão e carga útil."
No futuro, o novo sistema RDSR criado por esta equipe de pesquisadores poderá ajudar a lidar com tarefas complexas de forma mais eficiente e confiável, alcançando níveis mais altos de precisão. Em seus próximos estudos, Laschi e seus colegas gostariam de testar a eficácia dos robôs para aplicações biomédicas, incluindo cirurgia, reabilitação e atendimento a idosos.
"Também planejamos melhorar o braço macio que criamos em outros aspectos que não estão estritamente relacionados ao seu design e mecânica, mas ao controle de seus movimentos", acrescentou Laschi. "Adicionar e modelar a propriocepção distribuída, ou seja, a percepção da própria postura do braço, é um desafio a ser enfrentado, bem como um sistema de detecção robusto para detectar forças de contato".
+ Explorar mais Configuração e manipulação de robótica leve para manutenção em órbita
© 2022 Science X Network














