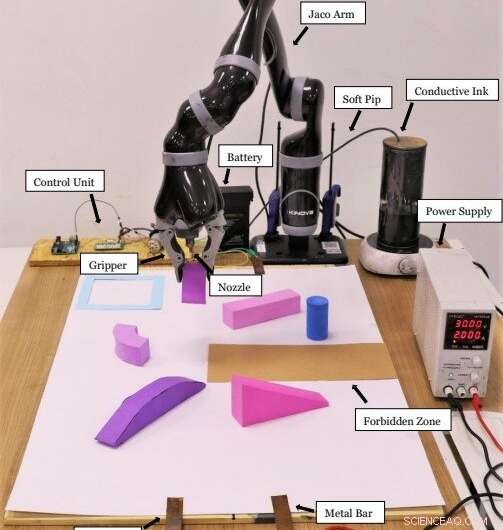
Configuração experimental do robô de desenho de circuitos. O Kinova 6DOF Jaco Arm primeiro realiza ações de pegar e colocar na pose sugerida pela rede. Em seguida, o braço se move para uma das barras de metal a 5 cm acima do papelão. O controlador ROS envia continuamente os waypoints do caminho do circuito calculados a partir do algoritmo de planejamento de caminho 3D. Um Arduino então recebe o estado do braço através do ROS e ativa/desativa a bomba peristáltica para controlar o fluxo de tinta. A conexão começa a apresentar condutividade após a secagem da tinta (30 minutos). Crédito:Xianglong Tan, Zhikang Liu, Chen Yu, Andre Rosendo, Reorganizando o ambiente para maximizar a energia com um desenho de circuito robótico. arXiv:2111.08147v1 [cs.RO], https://arxiv.org/abs/2111.08147
Os recentes avanços tecnológicos abriram caminho para a criação de sistemas robóticos cada vez mais sofisticados, projetados para completar missões de forma autônoma em diferentes ambientes familiares e desconhecidos. Robôs destinados a operar em ambientes incertos ou remotos podem se beneficiar muito da capacidade de adquirir ativamente energia elétrica de seus arredores.
Pesquisadores do Worcester Polytechnic Institute, Imperial College London e University of Illinois Urbana Champaign desenvolveram recentemente um novo sistema robótico que pode reorganizar visualmente seus arredores para receber a quantidade máxima de energia de uma determinada fonte de energia. Este robô, apresentado em um paper pré-publicado no arXiv e programado para ser apresentado na IEEE International Conference on Robotics and Biomimetics, trabalha desenhando circuitos elétricos usando tinta condutora.
"Nosso
PLOS ONE O trabalho começou como um experimento de pensamento bastante filosófico", disse Andre Rosendo, o professor que realizou o estudo, ao TechXplore. objetivo final. Com base nessa ideia, começamos a criar configurações experimentais onde nosso robô poderia não apenas agir para sobreviver, mas também para prosperar."
Crédito:Tan et al. Em seu primeiro estudo com foco neste tópico, Andre Rosendo, Xianglong Tan e Weijie Lyu tentaram conceber um sistema que pudesse se alimentar apenas pintando circuitos elétricos. Em seu novo trabalho, eles combinaram esse sistema de impressão de circuitos com uma garra robótica, criando um robô que pode realizar um repertório de ações visando obter maior potência (ou seja, tensões mais altas) de seu ambiente e, assim, sobreviver em ambientes desfavoráveis.
A equipe testou seu robô em simulações de diferentes cenários do mundo real, incluindo tarefas nas quais ele precisava evitar obstáculos físicos ou regiões que descontinuariam seus circuitos desenhados. Eles também testaram o robô em um cenário do mundo real, para avaliar melhor suas capacidades.
"Nosso robô inicia cada experimento com uma bateria, e sua fonte de energia diminui à medida que se move (e também a 'vazamos' para emular as perdas naturais de energia devido à homeostase)", explicou o estudante Xianglong Tan. "O robô passa por uma série de episódios de treinamento virtual, com um terminal Vermelho (VCC) que precisa ser conectado a outro terminal vermelho próximo ao seu corpo, e um terminal Preto (Terra) que precisa combinar com o preto para que a corrente pode fluir em direção a sua bateria."
Para evitar que seu robô simplesmente se mova em uma linha reta simples, Rosendo e seus colegas adicionaram obstáculos ao seu redor, tanto em testes simulados quanto no mundo real. Alguns desses obstáculos, como cubos de espuma, podiam ser facilmente removidos pelos robôs, enquanto outros eram conectados a uma placa de aterramento que “sugava” a energia elétrica quando um circuito o tocava.
A equipe descobriu que seu robô aprendeu rápida e efetivamente a superar esses obstáculos para sobreviver e maximizar a energia recebida. Isso significava reorganizar obstáculos ou áreas de ponte em seus arredores que não poderia atrair.
“Acho que estamos dando passos em direção a comportamentos adaptativos para robôs”, disse Rosendo. "Os seres humanos são capazes de se adaptar, ajustar seu comportamento para corresponder ao exigido em novas situações e melhorar gradualmente à medida que seu conhecimento amadurece. Poderíamos estar falando de esportes, tarefas ou até missões espaciais:antes de estar no topo de nosso jogo, passamos esforços iniciais para entender as novas regras para, posteriormente, melhorar e ir além. Os robôs hoje em dia lutam para superar falhas e aprender a se adaptar para se manterem funcionais é uma habilidade que eles deveriam imitar de nós."
O robô de adaptação criado por Rosendo e seus colegas pode ter inúmeras vantagens, pois pode maximizar de forma autônoma a energia em seu entorno e manter-se continuamente funcional criando novos circuitos elétricos. No futuro, este trabalho recente pode inspirar o desenvolvimento de outros sistemas robóticos que podem sobreviver e prosperar em ambientes complexos sem a necessidade de novos circuitos ou supervisão humana.
"Agora estamos pensando nos próximos passos para desenvolver nosso trabalho e manter esse experimento interessante, como complicar a tarefa e criar um sistema de 'troca de bateria' para tornar o experimento mais realista", acrescentou Tan.
+ Explorar mais Chip neuromórfico reduz drasticamente os requisitos de energia para o robô rolante
© 2022 Science X Network