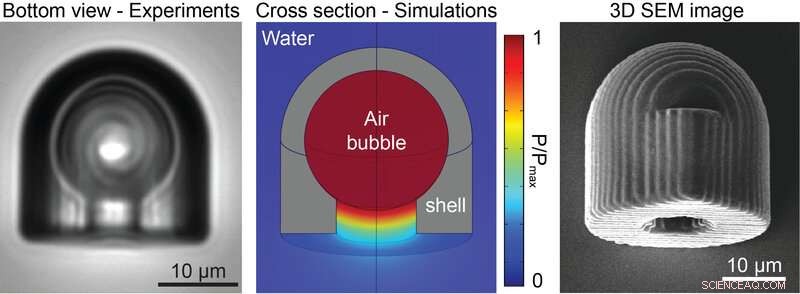
Figura 1. Imagem microscópica do microrrobô acusticamente acionado com uma bolha de ar esférica presa dentro de seu corpo (esquerda); Campo de pressão acústica em torno do microrrobô previsto pelas simulações numéricas (meio); Imagem de microscopia eletrônica de varredura do microrrobô impresso em três dimensões com uma barbatana afiada na parte superior (direita). Crédito:Instituto Max Planck para Sistemas Inteligentes de Stuttgart
Pesquisadores do Instituto Max Planck de Sistemas Inteligentes em Stuttgart projetaram e fabricaram um microrrobô não amarrado que pode deslizar ao longo de uma superfície plana ou curva em um líquido quando exposto a ondas de ultrassom. Sua força de propulsão é duas a três ordens de magnitude mais forte do que a força de propulsão de microorganismos naturais, como bactérias ou algas. Adicionalmente, pode transportar carga enquanto nada. O robô com propulsão acústica, portanto, tem um potencial significativo para revolucionar o futuro tratamento minimamente invasivo de pacientes.
Stuttgart — Pesquisadores do Instituto Max Planck para Sistemas Inteligentes (MPI-IS) em Stuttgart desenvolveram um modelo em forma de bala, robô sintético em miniatura com diâmetro de 25 micrômetros, que é acusticamente impulsionado para a frente - uma bala veloz, no verdadeiro sentido da palavra. Tamanho menor que o diâmetro de um fio de cabelo humano, nunca antes um microrrobô tão atuado atingiu essa velocidade. Seu design inteligente é tão eficiente que supera até mesmo as capacidades de natação dos microorganismos naturais.
Os cientistas projetaram o microrrobô de polímero impresso em 3-D com uma cavidade esférica e um pequeno bico tubular na parte inferior (veja a figura 1). Cercado por líquidos como água, a cavidade retém uma bolha de ar esférica. Uma vez que o robô é exposto a ondas acústicas de cerca de 330 kHz, a bolha de ar pulsa, empurrando o líquido dentro do tubo em direção à extremidade posterior do microrrobô. O movimento do líquido então impulsiona a bala para frente com bastante vigor em até 90 comprimentos de corpo por segundo. Essa é uma força de impulso duas a três ordens de magnitude mais forte do que a de microorganismos naturais, como algas ou bactérias. Ambos estão entre os micro-nadadores mais eficientes da natureza, otimizado pela evolução.
A implantação de ondas de ultrassom para acionar os microrrobôs não é uma abordagem nova. Contudo, robôs anteriores com capacidade de natação mostraram-se relativamente lentos, difícil de controlar perto de superfícies, e tiveram um tempo de operação relativamente curto de apenas alguns minutos. Todos esses fatores são obstáculos ao seu uso em aplicações médicas para a entrega de medicamentos direcionados, desintoxicação, ou cirurgias não invasivas. Os cientistas do Departamento de Inteligência Física do MPI-IS, Dra. Amirreza Aghakhani, Oncay Yasa, Paul Wrede, e Dr. Metin Sitti, quem é o diretor do departamento, foram capazes de ajustar as capacidades de direção de seu robô enquanto aumentava o tempo de operação para várias horas. Sua publicação "Microrrobôs móveis de deslizamento de superfície acionados acusticamente" foi publicada no Proceedings of the National Academy of Sciences em fevereiro de 2020.
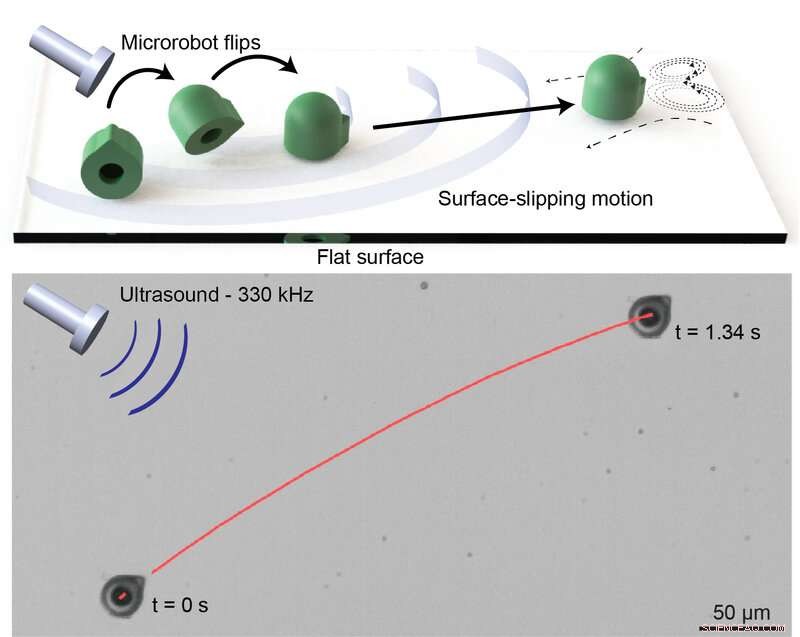
Figura 2. Esquema de um microrrobô de deslizamento de superfície sob alimentação de ultrassom (topo); Imagem de lapso de tempo do microbot em movimento em um substrato com excitação acústica de 330 kHz (parte inferior). Crédito:Instituto Max Planck para Sistemas Inteligentes de Stuttgart
Além de projetar o robô com uma cavidade interna prendendo uma bolha de ar esférica com uma pequena abertura, eles adicionaram uma pequena barbatana à superfície cilíndrica do corpo do microrrobô (ver figura 2), que influencia a direção da propulsão. Eles também revestiram a parte superior da bala de polímero com uma camada macia de nanofilme magnético. Com a ajuda de campos magnéticos externos circundantes, eles foram então capazes de alterar a direção da bala para a esquerda ou direita, bem como para cima ou para baixo.
Em vários experimentos, os pesquisadores testaram a capacidade de seu robô de se mover em diferentes superfícies dentro de um microcanal semelhante a um vaso sanguíneo. Eles expuseram o robô a ondas acústicas e um campo magnético e conseguiram navegá-lo neste espaço 3-D confinado. Eles também mostraram que a captura de carga ocorre automaticamente enquanto o microrrobô se move. Enquanto o líquido está sendo empurrado para fora da cavidade do robô quando exposto a ondas de ultrassom, um padrão de microstreaming circular é gerado na parte inferior (ver figura 2). Essa corrente garante que as partículas de droga ao redor sejam guiadas em direção ao robô. Lá, as partículas são acumuladas e transportadas para longe com o movimento do robô. Graças a isto, o robô poderia um dia ser aplicado para coletar partículas de drogas contra o câncer dentro da corrente sanguínea e, especificamente, transportar a droga para um carcinoma, liberando a carga a curta distância para máximo impacto.
Dra. Amirreza Aghakhani, um pesquisador de pós-doutorado no Departamento de Inteligência Física e co-autor principal da publicação, resume as características especiais do microrrobô:"Podemos acionar nossos microrrobôs de maneira muito eficiente, e também são muito rápidos. O ultrassom é inofensivo para o corpo e pode penetrar em regiões profundas do corpo. Podemos mover esses robôs em superfícies planas e curvas de maneira controlada e podemos anexar cargas diferentes, como drogas. Isso é impressionante. "
Outro benefício é a imagem de ultrassom. Dentro do corpo, a imagem é muito desafiadora quando o robô tem apenas vários micrômetros de tamanho. "Contudo, a bolha de ar presa pode atuar como um agente de contraste, tornando o robô e sua localização mais visíveis, "Dr. Aghakhani acrescenta.
"Nossa visão é implantar esses microrrobôs acionados acusticamente e dirigidos magneticamente dentro do corpo humano para várias aplicações médicas não invasivas em um futuro próximo, "Dr. Metin Sitti conclui.