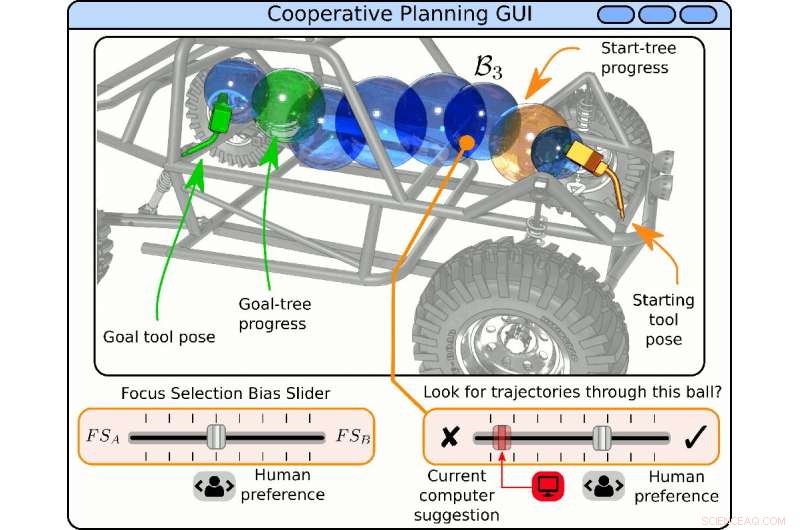
Esta imagem mostra uma interface gráfica de usuário de planejamento cooperativo, como aplicado em uma configuração de soldagem de conjunto de gaiola. o planejador de caminho é inicialmente encarregado de mover a ferramenta de soldagem de "pose de ferramenta inicial" para "pose de ferramenta de objetivo". Se o planejador de caminho encontra dificuldade em produzir uma solução, notifica os operadores humanos, que então criará uma série de bolas que constituem uma dica de como o robô deve se mover da "pose da ferramenta inicial" para a "pose da ferramenta do gol". Operadores humanos podem mover as bolas, redimensione as bolas e essencialmente deforme a sequência de bolas até que o planejador de caminho seja capaz de explorar as dicas fornecidas. Crédito:pradeep rajendran.
Pesquisadores do USC Viterbi Center for Advanced Manufacturing identificam um algoritmo para otimizar robôs para fornecer curto, soluções livres de colisão em espaços de manufatura complexos.
Imagine uma montadora de automóveis:milhares de tarefas repetitivas precisam ser realizadas diariamente, como inserir um volante em um carro. Uma vez que o robô aprende a melhor trajetória para ir do ponto A (onde as rodas estão empilhadas) ao ponto B (onde a roda precisa ser inserida), pode ser executado milhões de vezes, sem erros ou colisões.
Contudo, se esta tarefa for alterada, mesmo que ligeiramente - por exemplo, aumentando o tamanho da roda - o robô não será capaz de completar a tarefa.
Para ajudar a automatizar robôs para fornecer soluções de alta qualidade, mesmo em cenários de manufatura complexos, pesquisadores do Centro de Manufatura Avançada (CAM) da Escola de Engenharia USC Viterbi identificaram uma nova abordagem para automatizar os caminhos dos robôs em seus espaços de trabalho. Em pesquisa apresentada na Conferência Internacional sobre Robôs e Sistemas Inteligentes em 4 de novembro, 2019 em Macau, China, a equipe de pesquisa, incluindo o professor SK Gupta, Smith International Professor em Engenharia Mecânica e diretor CAM, e Ph.D. candidato Pradeep Rajendran, propôs um novo algoritmo de planejamento de caminho e interface que orienta os robôs a fazerem o mais curto, a rota mais rápida de um ponto de origem a um ponto de destino em um espaço de trabalho com o mínimo de intervenção humana.
"Propomos uma abordagem para obter feedback humano durante o planejamento de caminho automatizado para manipuladores que operam em áreas de trabalho muito complexas - por exemplo, operações de montagem de satélites, "Rajendran disse." Normalmente, os operadores do robô usam um planejador de caminho automático para planejar uma trajetória para o robô completar a tarefa dentro do espaço de trabalho. Se o planejamento do caminho falhar - o que significa que a trajetória proposta não produz os resultados desejados - os operadores do robô precisam inserir manualmente os waypoints - pontos específicos ao longo do caminho para guiar o robô de sua origem ao destino. "
Esta situação surge com mais frequência em espaços de trabalho complexos ou confinados, como a operação de montagem do satélite, onde geometrias de espaço de trabalho mais difíceis, obstáculos físicos e mudanças mais frequentes ou customização exigem que os robôs executem caminhos complexos. Como resultado, operadores de robôs perdem um tempo valioso inserindo informações manualmente para cada cenário, derrotando o propósito de usar a automação em primeiro lugar.
O algoritmo funciona fornecendo uma interface amigável para que o robô reúna a entrada do operador humano no início do planejamento do caminho - o processo de mapeamento da rota que o robô deve seguir no local de trabalho para realizar sua tarefa. O operador humano é alertado, por meio de dicas visuais no programa, para as áreas mais complexas que o robô precisará navegar e pode fornecer informações de acordo, para produzir diretivas de alto nível. Como resultado, quando o robô encontra pequenas alterações em sua tarefa - como o aumento do tamanho da roda mencionado anteriormente - ele será capaz de usar essas diretivas e ajustar seu caminho de acordo.
O método desenvolvido por pesquisadores do Departamento de Engenharia Aeroespacial e Mecânica da USC Viterbi, que também inclui o associado de pesquisa de pós-doutorado Ariyan Kabir, Ph.D. o estudante Shantanu Thakar e o cientista pesquisador do CAM Brual Shah - priorizam a automação, garantindo que o programa de planejamento de caminho apenas obtenha ajuda quando for necessário. Normalmente, leva de 15 a 30 minutos para especificar um caminho manualmente; com o algoritmo de planejamento de caminho, o caminho pode ser gerado em alguns segundos.
"Na fabricação de pequeno volume, os robôs realizam muitas tarefas não repetitivas que mudam com frequência. A programação de robôs para cada uma dessas iterações de tarefas não é apenas demorada, é tedioso e ineficiente, "Rajendran disse." Com este novo algoritmo, demonstramos que muitos processos não repetitivos encontrados em aplicações de fabricação de pequeno volume podem ser automatizados facilmente, com o mínimo de entrada de operadores humanos. "