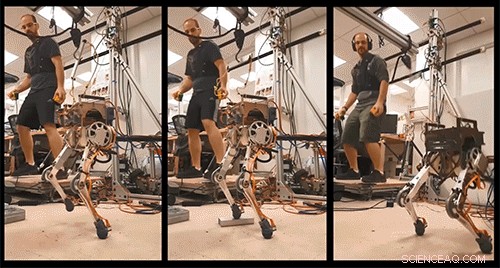
João Ramos teleopera o Pequeno HERMES, um robô bípede que pode imitar o equilíbrio de um operador para ficar em pé durante a execução, andando, e pulando no lugar. Crédito:João Ramos e Sangbae Kim
Resgatando vítimas de um prédio em chamas, um derramamento químico, ou qualquer desastre que seja inacessível para respondentes humanos pode um dia ser uma missão para resilientes, robôs adaptáveis. Imagine, por exemplo, bots de resgate que podem passar pelos escombros de quatro, em seguida, levante-se sobre duas pernas para afastar um obstáculo pesado ou arrombar uma porta trancada.
Os engenheiros estão avançando no design de robôs de quatro patas e em sua capacidade de correr, pular e até dar cambalhotas. Mas ficando de duas pernas, robôs humanóides para exercer força ou empurrar algo sem cair têm sido um obstáculo significativo.
Agora, os engenheiros do MIT e da Universidade de Illinois em Urbana-Champaign desenvolveram um método para controlar o equilíbrio em uma robô teleoperado - uma etapa essencial para permitir que um humanóide execute tarefas de alto impacto em ambientes desafiadores.
O robô da equipe, fisicamente semelhante a um torso usinado e duas pernas, é controlado remotamente por um operador humano vestindo um colete que transmite informações sobre o movimento do ser humano e as forças de reação do solo ao robô.
Através do colete, o operador humano pode dirigir a locomoção do robô e sentir seus movimentos. Se o robô está começando a tombar, o humano sente uma puxada correspondente no colete e pode se ajustar de forma a se reequilibrar e, sincronicamente, o robô.
Em experimentos com o robô para testar esta nova abordagem de "feedback de equilíbrio", os pesquisadores conseguiram manter o equilíbrio do robô remotamente enquanto ele saltava e caminhava em sincronia com seu operador humano.
"É como correr com uma mochila pesada - você pode sentir como a dinâmica da mochila se move ao seu redor, e você pode compensar adequadamente, diz João Ramos, que desenvolveu a abordagem como um pós-doutorado do MIT. "Agora, se você quiser abrir uma porta pesada, o humano pode comandar o robô para jogar seu corpo na porta e empurrá-la para abri-la, sem perder o equilíbrio. "
Ramos, que agora é professor assistente na Universidade de Illinois em Urbana-Champaign, detalhou a abordagem em um estudo publicado em Ciência Robótica . Seu co-autor no estudo é Sangbae Kim, professor associado de engenharia mecânica no MIT.
Mais que movimento
Anteriormente, Kim e Ramos construíram o robô de duas pernas HERMES (para mecanismos robóticos altamente eficientes e sistema eletromecânico) e desenvolveram métodos para que ele imitasse os movimentos de um operador via teleoperação, uma abordagem que, segundo os pesquisadores, traz certas vantagens humanísticas.
"Porque você tem uma pessoa que pode aprender e se adaptar na hora, um robô pode realizar movimentos que nunca foram praticados antes [via teleoperação], "Ramos diz.
Em demonstrações, HERMES derramou café em uma xícara, empunhou um machado para cortar madeira, e segurou um extintor para apagar um incêndio.
Todas essas tarefas envolveram a parte superior do corpo do robô e algoritmos para combinar o posicionamento dos membros do robô com o de seu operador. O HERMES foi capaz de realizar movimentos de alto impacto porque o robô estava enraizado no lugar. Equilíbrio, nesses casos, era muito mais simples de manter. Se o robô fosse obrigado a tomar alguma providência, Contudo, provavelmente teria tombado ao tentar imitar os movimentos do operador.
“Percebemos para gerar altas forças ou mover objetos pesados, apenas copiar os movimentos não seria suficiente, porque o robô cairia facilmente, "Kim diz." Precisávamos copiar o equilíbrio dinâmico do operador. "
Digite o pequeno HERMES, uma versão em miniatura do HERMES que tem cerca de um terço do tamanho de um adulto humano médio. A equipe projetou o robô simplesmente como um torso e duas pernas, e projetou o sistema especificamente para testar tarefas da parte inferior do corpo, como locomoção e equilíbrio. Tal como acontece com sua contraparte de corpo inteiro, Little HERMES é projetado para teleoperação, com um operador vestido com um colete para controlar as ações do robô.
Para que o robô copie o equilíbrio do operador em vez de apenas seus movimentos, a equipe teve que primeiro encontrar uma maneira simples de representar o equilíbrio. Ramos finalmente percebeu que o equilíbrio poderia ser reduzido a dois ingredientes principais:o centro de massa de uma pessoa e seu centro de pressão - basicamente, um ponto no solo onde uma força equivalente a todas as forças de apoio é exercida.
A localização do centro de massa em relação ao centro de pressão, Ramos encontrou, relaciona-se diretamente ao grau de equilíbrio de uma pessoa em um determinado momento. Ele também descobriu que a posição desses dois ingredientes poderia ser representada fisicamente como um pêndulo invertido. Imagine oscilar de um lado para o outro enquanto permanece enraizado no mesmo lugar. O efeito é semelhante ao balanço de um pêndulo de cabeça para baixo, a extremidade superior representa o centro de massa de um ser humano (geralmente no torso) e a inferior representa o centro de pressão no solo.
Levantamento pesado
Para definir como o centro de massa se relaciona com o centro de pressão, Ramos reuniu dados de movimento humano, incluindo medições no laboratório, onde ele oscilou para frente e para trás, caminhou no lugar, e saltou em uma plataforma de força que mediu as forças que ele exerceu no solo, como a posição de seus pés e torso foram registrados. Ele então condensou esses dados em medições do centro de massa e do centro de pressão, e desenvolveu um modelo para representar cada um em relação ao outro, como um pêndulo invertido.
Ele então desenvolveu um segundo modelo, semelhante ao modelo para equilíbrio humano, mas dimensionado para as dimensões do menor, robô mais leve, e ele desenvolveu um algoritmo de controle para vincular e permitir feedback entre os dois modelos.
Os pesquisadores testaram este modelo de feedback de equilíbrio, primeiro em um pêndulo invertido simples que eles construíram no laboratório, na forma de uma viga com aproximadamente a mesma altura do Pequeno HERMES. Eles conectaram o feixe ao seu sistema de teleoperação, e balançava para frente e para trás ao longo de uma trilha em resposta aos movimentos de um operador. Quando o operador oscilou para um lado, a trave fez o mesmo - um movimento que o operador também pôde sentir através do colete. Se o feixe oscilou muito, o operador, sentindo a atração, poderia inclinar-se para o outro lado para compensar, e manter o feixe equilibrado.
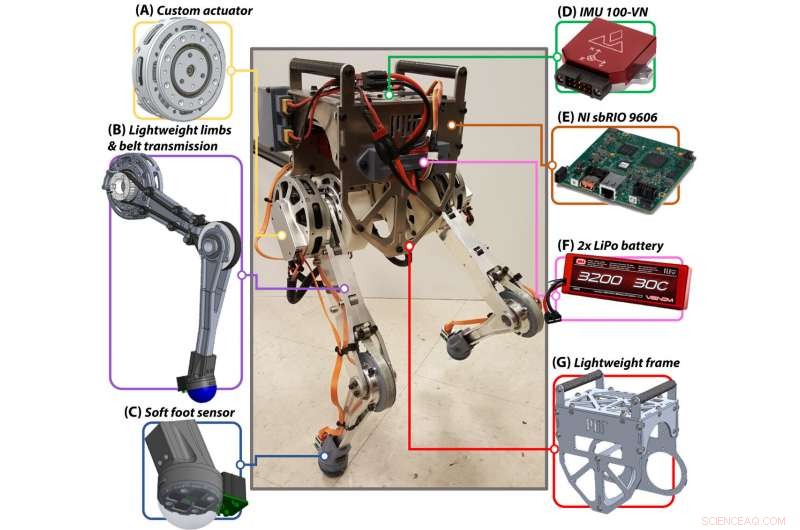
O robô bípede Little HERMES. Crédito:Ramos e Kim, Sci. Robô. 4, eaav4282 (2019)
Os experimentos mostraram que o novo modelo de feedback poderia funcionar para manter o equilíbrio na viga, então os pesquisadores tentaram o modelo no Little HERMES. Eles também desenvolveram um algoritmo para o robô traduzir automaticamente o modelo simples de equilíbrio para as forças que cada um de seus pés teria que gerar, para copiar os pés do operador.
No laboratório, Ramos descobriu que enquanto usava o colete, ele não só conseguia controlar os movimentos e o equilíbrio do robô, mas ele também podia sentir os movimentos do robô. Quando o robô foi atingido por um martelo de várias direções, Ramos sentiu o colete sacudir na direção em que o robô se movia. Ramos resistiu instintivamente ao puxão, que o robô registrou como uma mudança sutil no centro de massa em relação ao centro de pressão, que por sua vez imitou. O resultado foi que o robô foi capaz de não tombar, mesmo em meio a golpes repetidos em seu corpo.
O pequeno HERMES também imitou Ramos em outros exercícios, incluindo correr e pular no lugar, e andar em terreno irregular, tudo isso mantendo o equilíbrio sem a ajuda de amarras ou suportes.
"O feedback de equilíbrio é uma coisa difícil de definir porque é algo que fazemos sem pensar, "Kim diz." Esta é a primeira vez que o feedback do equilíbrio é definido adequadamente para as ações dinâmicas. Isso mudará a forma como controlamos um humanóide teleoperado. "
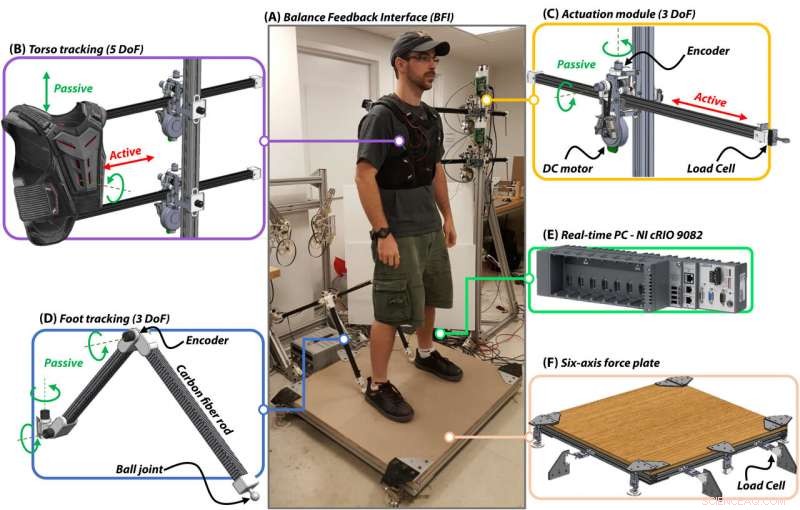
A interface de teleoperação para o operador humano. Crédito:Ramos e Kim, Sci. Robô. 4, eaav4282 (2019)
Kim e Ramos continuarão a trabalhar no desenvolvimento de um humanóide de corpo inteiro com controle de equilíbrio semelhante, para um dia ser capaz de galopar através de uma zona de desastre e se levantar para afastar barreiras como parte de missões de resgate ou salvamento.
"Agora podemos abrir portas pesadas, levantar ou lançar objetos pesados, com comunicação de equilíbrio adequada, "Kim diz.