Uma equipe multidisciplinar de robótica composta por professores da Escola de Engenharia Tandon da NYU está projetando sistemas de controle para impressoras 3D em braços robóticos em cima de dispositivos móveis, plataformas móveis. Funcionando em equipes - um conceito chamado manufatura aditiva coletiva (CAM) - essas impressoras, com aprendizado de máquina e outros recursos de inteligência artificial (IA), poderia reparar estruturas cívicas; trabalho nas profundezas do oceano e zonas de desastre; ou até mesmo ir para o espaço para trabalhar na Lua, Marte, e além. Crédito:NYU Tandon
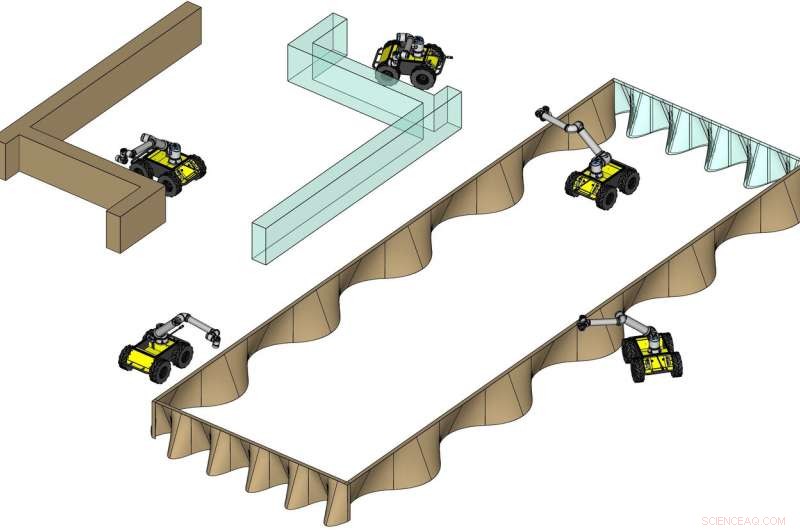
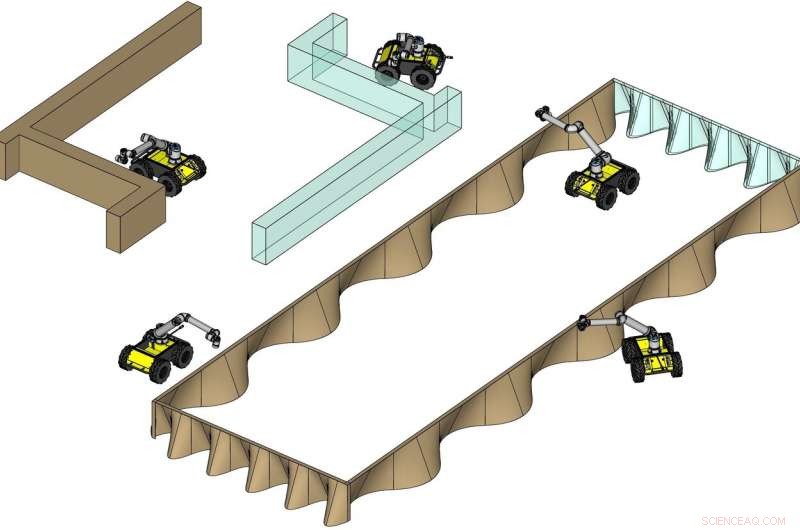
A impressão 3-D comercial - ou manufatura aditiva (AM) - é uma indústria em expansão. Mas se as impressoras fossem liberadas da configuração típica envolvendo uma caixa imóvel e um pórtico, e liberado para trabalhar na perambulação, equipes colaborativas, o negócio de AM pode ser muito maior com muitos mais aplicativos, inclusive como pedreiros robóticos em canteiros de obras e reparando infraestrutura civil urbana e rural em ruínas.
Uma equipe multidisciplinar de robótica na NYU Tandon School of Engineering, patrocinado pelo Centro de Ciência Urbana e Progresso (CUSP) da NYU e apoiado por uma doação de US $ 1,2 milhão da National Science Foundation (NSF), está trabalhando para tornar o conceito uma realidade, projetando sistemas autônomos para impressoras 3-D em braços robóticos conectados a dispositivos móveis, plataformas móveis. Funcionando em equipes - um conceito chamado manufatura aditiva coletiva (CAM) - essas impressoras, com aprendizado de máquina e outros recursos de inteligência artificial (IA), poderia consertar pontes, túneis e outras estruturas cívicas; trabalho nas profundezas do oceano e zonas de desastre; ou até mesmo ir para o espaço para trabalhar na Lua, Marte, e além.
Os pesquisadores, Chen Feng, Maurizio Porfiri, Ludovic Righetti, e Weihua Jin, professores dos Departamentos de Engenharia Civil e Urbana, Engenharia Mecânica e Aeroespacial, e Engenharia Elétrica e de Computação, se concentrará em três áreas críticas para tornar viáveis as equipes CAM de impressão 3D:autonomia, ao controle, sistemas e redes em tempo real:
Feng explicou que o objetivo é a precisão, eficiência, e adaptabilidade ao ambiente e às condições em tempo real - em vez da forma como um aplicativo de navegação redireciona um veículo que ele sente que se desviou de um curso mapeado. Ao contrário do serviço de navegação baseado em GPS típico, Contudo, os ajustes devem ser ultrarrápidos e precisos de alguns milímetros, não algumas dezenas de pés. Ele acrescentou que a combinação única de experiência em robótica da equipe, inteligência artificial, teoria de controle, e os sistemas dinâmicos tornam os desafios superáveis.
Feng se concentrará no planejamento e localização, enfrentar desafios como permitir que o robô identifique quando e quando não precisa de um alto grau de precisão para se localizar.
"O robô deve ser capaz de se mover rapidamente para a área de impressão, observar as condições reais, como terreno irregular, já que o mundo real não é plano, faça compensações imediatamente, "disse ele." E embora desejemos ter um maior grau de precisão na área da estrutura, quanto mais longe você está da estrutura, menos você precisa, Ele explicou. "Isso envolverá um novo tipo de localização proativa."
Chen Feng, professores da NYU Tandon, Ludovic Righetti e Maurizio Porfiri estão projetando sistemas para manufatura aditiva coletiva, em que equipes de robôs móveis de impressão 3D trabalham juntas para reparar ou construir estruturas, ou até mesmo trabalhar na lua ou em Marte. Crédito:NYU Tandon
Righetti trabalhará em algoritmos de controle otimizados em tempo real para cada impressora móvel, para permitir que o robô se adapte rapidamente ao ambiente.
“Cada robô tem que observar o que está sendo impresso, associá-lo autonomamente ao design do projeto, e reconhecer instantaneamente se a estrutura impressa se desviou dela, e por quanto, e, ao mesmo tempo, decidir quais são as próximas melhores ações para garantir a impressão adequada da estrutura, " ele disse.
Porfiri irá desenvolver uma estrutura matemática para permitir que os robôs coordenem de forma autônoma suas respectivas ações dentro do ambiente físico em evolução, permitindo que várias impressoras móveis criem simultaneamente uma estrutura com maior eficiência. Essa capacidade seria especialmente importante em lugares como Marte, onde não há um servidor remoto próximo o suficiente para controlar os esforços coordenados dos robôs sem um intervalo de tempo.
“Diferente de drones voando em formação ou carros autônomos mantendo distância uns dos outros, nossas impressoras móveis deixam uma pegada única no ambiente físico:o objeto que está sendo impresso. Meu trabalho aproveitará essa pegada para estabelecer algoritmos eficazes para coordenação e impressão coletiva. "
Jin ajudará a equipe a desenvolver novos materiais compostos adequados para impressão móvel em concreto 3-D. A equipe planeja demonstrar a eficácia dos algoritmos por meio da impressão 3-D do mundo real desses novos concretos usando impressoras móveis que construirão na NYU Tandon.
"Para liberar todo o potencial da manufatura aditiva coletiva, vários limites científicos devem ser empurrados, garantindo a implantação ideal de vários robôs móveis que imprimem grandes estruturas de acordo com uma engenharia, design virtual, "disse Feng.
O projeto inclui um workshop da indústria sobre CAM, uma exposição pública ao ar livre, kit educacional acessível / aberto no CAM, Competição CAM em escala de desktop do ensino fundamental e médio, atividades empreendedoras e um esforço de diversidade para alunos de todas as origens.