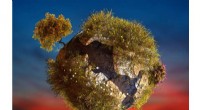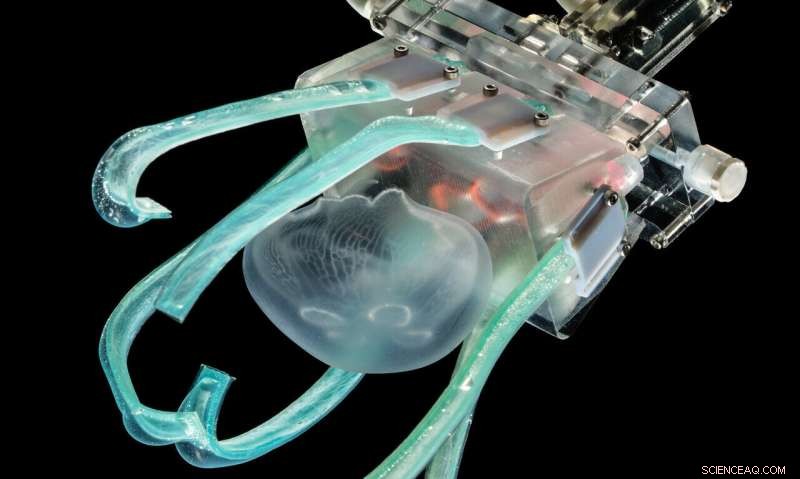
A garra robótica macia de criaturas gelatinosas. Crédito:Sinatra et al., Sci. Robô. 4, eaax5425 (2019)
As medusas são cerca de 95% de água, tornando-os alguns dos mais diáfanos, animais delicados do planeta. Mas os 5% restantes renderam importantes descobertas científicas, como a proteína fluorescente verde (GFP) que agora é amplamente usada por cientistas para estudar a expressão do gene, e a reversão do ciclo de vida que poderia ser a chave para combater o envelhecimento. A água-viva pode muito bem abrigar outras, segredos potencialmente transformadores, mas a dificuldade de coletá-los limitou severamente o estudo dessa "fauna esquecida". As ferramentas de amostragem disponíveis para biólogos marinhos em veículos operados remotamente (ROVs) foram amplamente desenvolvidas para as indústrias marítimas de petróleo e gás, e são muito mais adequados para agarrar e manipular pedras e equipamentos pesados do que geléias, muitas vezes despedaçando-os na tentativa de capturá-los.
Agora, uma nova tecnologia desenvolvida por pesquisadores do Instituto Wyss de Engenharia Inspirada na Biologia de Harvard, Escola de Engenharia e Ciências Aplicadas John A. Paulson (SEAS), e o Baruch College da CUNY oferece uma solução inovadora para esse problema na forma de um aparelho ultramacio, pinça subaquática que usa pressão hidráulica para envolver suavemente, mas com firmeza, seus dedos parecidos com fettuccini em torno de uma única água-viva, em seguida, solte-o sem causar danos. A garra é descrita em um novo artigo publicado em Ciência Robótica .
"Nossa garra ultrassuave é uma melhoria clara em relação aos dispositivos existentes de amostragem de águas profundas para geleias e outras criaturas de corpo mole que de outra forma seriam quase impossíveis de coletar intactas, "disse a primeira autora Nina Sinatra, Ph.D., um ex-aluno de graduação do Wyss Institute que agora é engenheiro mecânico e de materiais no Google. "Esta tecnologia também pode ser estendida para melhorar as técnicas de análise subaquática e permitir o estudo extensivo das características ecológicas e genéticas dos organismos marinhos sem tirá-los da água."
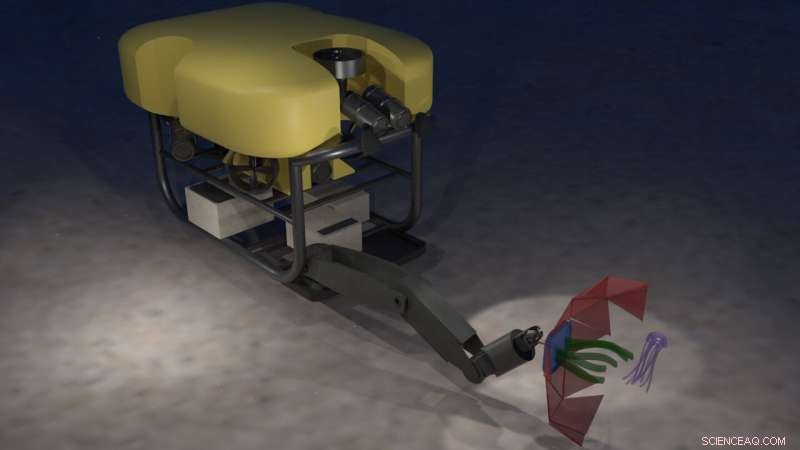
Ilustração que demonstra a aplicação prevista de atuadores robóticos macios (verde) acoplados a um veículo operado remotamente. Crédito:Sinatra et al., Sci. Robô. 4, eaax5425 (2019)
Os seis "dedos" da garra são compostos de finos, tiras planas de silicone com um canal oco no interior ligado a uma camada de nanofibras de polímero flexíveis, mas mais rígidas. Os dedos são presos a um retângulo, "Palma" de plástico impresso em 3D e, quando seus canais estão cheios de água, ondular na direção do lado revestido com nanofibra. Cada um dos dedos exerce uma quantidade extremamente baixa de pressão - cerca de 0,0455 kPA, ou menos de um décimo da pressão da pálpebra humana em seu olho. Por contraste, atuais garras marinhas suaves de última geração, que são usados para capturar animais delicados, mas mais robustos do que medusas, exercer cerca de 1 kPA.
Os pesquisadores ajustaram sua garra ultrassuave a um dispositivo portátil especialmente criado e testaram sua capacidade de agarrar uma água-viva de silicone artificial em um tanque de água para determinar o posicionamento e a precisão necessária para coletar uma amostra com sucesso, bem como o ângulo e velocidade ideais para capturar uma água-viva. Eles então mudaram para a coisa real no Aquário da Nova Inglaterra, onde eles usaram as garras para agarrar geleias de lua, gordura de gelatina, e geléias manchadas, tudo mais ou menos do tamanho de uma bola de golfe.
A garra foi capaz de prender cada água-viva contra a palma do dispositivo, e a água-viva não conseguiu se soltar da mão dos dedos até que a pinça fosse despressurizada. A água-viva não mostrou sinais de estresse ou outros efeitos adversos após ser liberada, e os dedos foram capazes de abrir e fechar cerca de 100 vezes antes de mostrar sinais de desgaste.
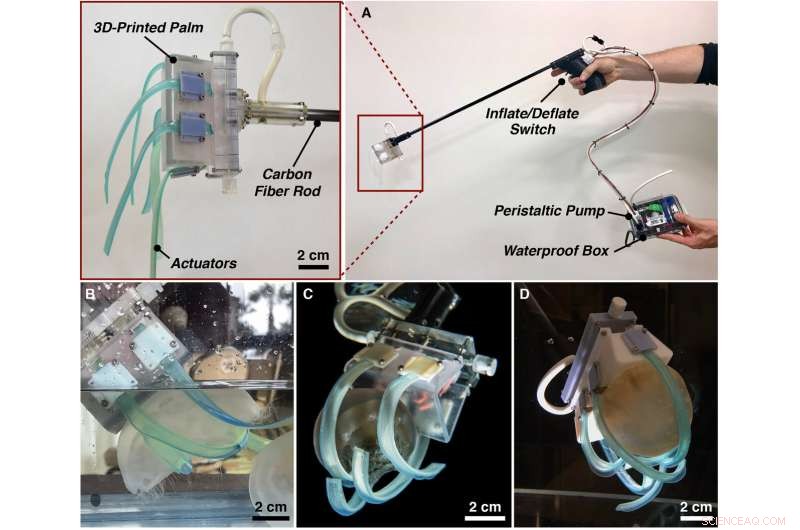
Projeto de dispositivo de aperto robótico macio, mostrado com um cubo de quatro atuadores. Inserção:partes diferentes, incluindo a palma de seis atuadores, pode ser conectado modularmente. Atuadores reforçados com fibra macia agarrando (B) Aurelia aurita, (C) Catostylus mosaicus, e (D) Mastigias papua. (C-D) Crédito:Anand Varma
"Os biólogos marinhos têm esperado muito tempo por uma ferramenta que reproduz a suavidade das mãos humanas ao interagir com animais delicados como águas-vivas de ambientes inacessíveis, "disse o co-autor David Gruber, Ph.D., que é professor de Biologia e Ciências Ambientais no Baruch College, CUNY e uma exploradora National Geographic. "Esta garra é parte de uma caixa de ferramentas robótica soft em constante crescimento que promete tornar a coleta de espécies subaquáticas mais fácil e segura, o que melhoraria muito o ritmo e a qualidade da pesquisa em animais que têm sido subestimados por centenas de anos, dando-nos uma imagem mais completa dos ecossistemas complexos que constituem os nossos oceanos. "
A garra ultramacia é a mais recente inovação no uso de robótica suave para amostragem subaquática, uma colaboração contínua entre Gruber e Rob Wood, membro do corpo docente da Fundação Wyss, Ph.D. que produziu o amostrador RAD inspirado em origami e "dedos macios" multifuncionais para coletar uma ampla variedade de organismos difíceis de capturar, incluindo lulas, polvos, esponjas, chicotes do mar, corais, e mais.
"A robótica leve é uma solução ideal para problemas de longa data como este em uma ampla variedade de campos, porque combina a programabilidade e a robustez dos robôs tradicionais com uma suavidade sem precedentes graças aos materiais flexíveis usados, "disse Wood, que é o co-líder da plataforma Bioinspired Soft Robotics do Wyss Institute, o Professor Charles River de Engenharia e Ciências Aplicadas no SEAS, e um National Geographic Explorer.
A equipe continua a refinar o design da garra ultramacia, e tem como objetivo realizar estudos que avaliem a resposta fisiológica das águas-vivas ao serem seguradas pela garra, para provar de forma mais definitiva que eles não causam estresse aos animais. Wood e Gruber também são co-investigadores principais do projeto "Designing the Future" do Schmidt Ocean Institute, e ainda testará seus vários robôs subaquáticos em uma próxima expedição a bordo do navio de pesquisa Falkor em 2020.
"No Wyss Institute estamos sempre perguntando, 'Como podemos tornar isso melhor?' Estou extremamente impressionado com a engenhosidade e o pensamento inovador que Rob Wood e sua equipe aplicaram para resolver um problema do mundo real que existe no oceano aberto, em vez de no laboratório. Isso poderia ajudar a avançar muito a ciência dos oceanos, "disse o Diretor Fundador do Wyss Institute, Donald Ingber, M.D., Ph.D., que também é o professor Judah Folkman de Biologia Vascular na Harvard Medical School, o Programa de Biologia Vascular do Hospital Infantil de Boston, e Professor de Bioengenharia do SEAS.