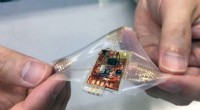
Os engenheiros do MIT desenvolvem fio robótico magneticamente orientável (em preto), pequeno o suficiente para trabalhar em espaços estreitos, como a vasculatura do cérebro humano. Os pesquisadores prevêem que a tecnologia pode ser usada no futuro para limpar bloqueios em pacientes com acidente vascular cerebral e aneurismas. Crédito:MIT
Os engenheiros do MIT desenvolveram um sistema orientável magneticamente, robô semelhante a um fio que pode deslizar ativamente em estreito, caminhos sinuosos, como a vasculatura labríntica do cérebro.
No futuro, este fio robótico pode ser emparelhado com tecnologias endovasculares existentes, permitindo que os médicos guiem remotamente o robô através dos vasos cerebrais de um paciente para tratar rapidamente bloqueios e lesões, como aqueles que ocorrem em aneurismas e acidentes vasculares cerebrais.
"O AVC é a quinta causa de morte e uma das principais causas de incapacidade nos Estados Unidos. Se o AVC agudo puder ser tratado nos primeiros 90 minutos ou mais, as taxas de sobrevivência dos pacientes podem aumentar significativamente, "diz Xuanhe Zhao, professor associado de engenharia mecânica e de engenharia civil e ambiental no MIT. "Se pudéssemos projetar um dispositivo para reverter o bloqueio dos vasos sanguíneos nesta 'hora de ouro, 'nós poderíamos potencialmente evitar danos cerebrais permanentes. Essa é a nossa esperança. "
Zhao e sua equipe, incluindo o autor principal Yoonho Kim, um estudante de pós-graduação no Departamento de Engenharia Mecânica do MIT, descreva seu design robótico suave no jornal Ciência Robótica . Os outros co-autores do artigo são o estudante de graduação do MIT German Alberto Parada e o estudante visitante Shengduo Liu.
Em uma situação difícil
Para limpar coágulos sanguíneos no cérebro, os médicos costumam realizar um procedimento endovascular, uma cirurgia minimamente invasiva em que um cirurgião insere um fio fino através da artéria principal de um paciente, geralmente na perna ou virilha. Guiado por um fluoroscópio que faz imagens simultaneamente dos vasos sanguíneos por meio de raios-X, o cirurgião então gira manualmente o fio para cima no vaso cerebral danificado. Um cateter pode então ser enfiado ao longo do fio para entregar medicamentos ou dispositivos de remoção de coágulos para a região afetada.
Kim diz que o procedimento pode ser fisicamente desgastante, exigindo cirurgiões, que deve ser especificamente treinado na tarefa, para suportar a exposição repetida à radiação de fluoroscopia.
"É uma habilidade exigente, e simplesmente não há cirurgiões suficientes para os pacientes, especialmente em áreas suburbanas ou rurais, "Kim diz.
Os fios-guia médicos usados em tais procedimentos são passivos, o que significa que devem ser manipulados manualmente, e são normalmente feitos de um núcleo de ligas metálicas, revestido em polímero, um material que Kim diz que pode gerar atrito e danificar os revestimentos dos vasos se o fio ficar temporariamente preso em um espaço particularmente apertado.
A equipe percebeu que os desenvolvimentos em seu laboratório poderiam ajudar a melhorar esses procedimentos endovasculares, tanto no desenho do fio-guia quanto na redução da exposição dos médicos a qualquer radiação associada.
Enfiar uma linha na agulha
Ao longo dos últimos anos, a equipe acumulou experiência em hidrogéis - materiais biocompatíveis feitos principalmente de água - e materiais impressos em 3-D acionados magneticamente que podem ser projetados para rastejar, pular, e até pegar uma bola, simplesmente seguindo a direção de um ímã.
Neste novo artigo, os pesquisadores combinaram seus trabalhos em hidrogéis e em atuação magnética, para produzir um dirigível magneticamente, fio robótico revestido de hidrogel, ou fio-guia, que eles foram capazes de tornar finos o suficiente para guiar magneticamente através de uma réplica de silicone em tamanho real dos vasos sanguíneos do cérebro.
O núcleo do fio robótico é feito de liga de níquel-titânio, ou "nitinol, "um material que é flexível e elástico. Ao contrário de um cabide, que manteria sua forma quando dobrada, um fio de nitinol voltaria à sua forma original, dando-lhe mais flexibilidade para enrolar apertado, vasos tortuosos. A equipe revestiu o núcleo do fio com uma pasta de borracha, ou tinta, que eles incorporaram com partículas magnéticas.
Finalmente, eles usaram um processo químico que desenvolveram anteriormente, para revestir e unir a cobertura magnética com hidrogel - um material que não afeta a capacidade de resposta das partículas magnéticas subjacentes e ainda fornece ao fio um livre de fricção, superfície biocompatível.
Eles demonstraram a precisão e ativação do fio robótico usando um grande ímã, muito parecido com as cordas de uma marionete, para conduzir o fio através de uma pista de obstáculos de pequenos anéis, uma reminiscência de um fio abrindo caminho através do buraco de uma agulha.
Os pesquisadores também testaram o fio em uma réplica de silicone em tamanho natural dos principais vasos sanguíneos do cérebro, incluindo coágulos e aneurismas, modelado após as tomografias computadorizadas do cérebro de um paciente real. A equipe encheu os vasos de silicone com um líquido simulando a viscosidade do sangue, em seguida, manipulou manualmente um grande ímã ao redor do modelo para orientar o robô através do enrolamento das embarcações, caminhos estreitos.
Kim diz que o thread robótico pode ser funcionalizado, o que significa que recursos podem ser adicionados, por exemplo, para administrar drogas redutoras de coágulos ou romper bloqueios com luz laser. Para demonstrar o último, a equipe substituiu o núcleo de nitinol do fio por uma fibra óptica e descobriu que poderia dirigir o robô magneticamente e ativar o laser assim que o robô atingisse uma região-alvo.
Quando os pesquisadores fizeram comparações entre o fio robótico revestido e não revestido com hidrogel, eles descobriram que o hidrogel deu ao fio um muito necessário, vantagem escorregadia, permitindo que ele deslize por espaços mais estreitos sem ficar preso. Em uma cirurgia endovascular, essa propriedade seria a chave para evitar atrito e ferimentos nos revestimentos do vaso conforme a rosca passa.
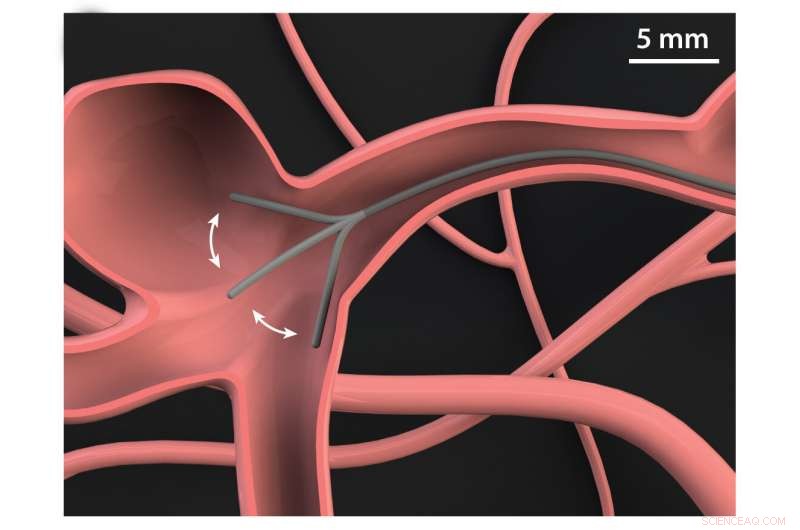
Ilustração do robô contínuo suave em escala submilimétrica navegando através de uma vascularização complexa com um aneurisma. Crédito:Kim et al., Sci. Robô. 4, eaax7329 (2019)
E como esse novo fio robótico pode manter os cirurgiões livres de radiação? Kim diz que um fio-guia magneticamente orientável elimina a necessidade de os cirurgiões empurrarem fisicamente um fio através dos vasos sanguíneos do paciente. Isso significa que os médicos também não precisariam estar próximos de um paciente, e mais importante, o fluoroscópio gerador de radiação.
No futuro próximo, ele prevê cirurgias endovasculares que incorporem tecnologias magnéticas existentes, como pares de grandes ímãs, as instruções que os médicos podem manipular do lado de fora da sala de cirurgia, longe da imagem do fluoroscópio do cérebro do paciente, ou mesmo em um local totalmente diferente.
"As plataformas existentes podem aplicar o campo magnético e fazer o procedimento de fluoroscopia ao mesmo tempo no paciente, e o médico pode estar na outra sala, ou mesmo em uma cidade diferente, controlar o campo magnético com um joystick, "Kim diz." Nossa esperança é alavancar as tecnologias existentes para testar nosso thread robótico in vivo na próxima etapa. "