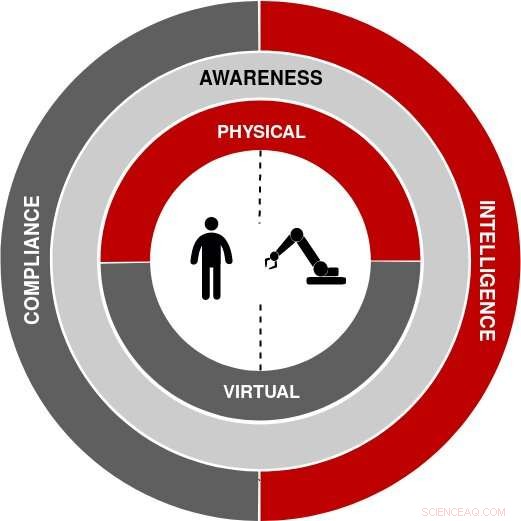
Um diagrama de sistema para a estrutura conceitual para uma Colaboração de Robôs Humanos como Sistema de Sistemas que destaca os 3 aspectos de um sistema HRC:Conscientização, Inteligência e conformidade. Crédito:Savur, Kumar &Sahin.
Pesquisadores do Century Mold Collaborative Robotics Laboratory (CMCRL) no Rochester Institute of Technology (RIT) em Nova York desenvolveram recentemente uma nova estrutura para monitorar as respostas fisiológicas humanas enquanto os usuários estão colaborando com um robô para completar uma tarefa. Sob a supervisão do Prof. Ferat Sahin, diretor do Laboratório de Bio-Robótica Multiagente, Os pesquisadores do CMCRL estão trabalhando para desenvolver sistemas, frameworks e ferramentas de software para estudar a colaboração humano-robô em um ambiente industrial. Sua nova abordagem, descrito em um artigo pré-publicado no arXiv e definido para ser apresentado no IEEE Systems, Conferência Man &Cybernetics em Bari (Itália), permite a coleta contínua de dados fisiológicos durante as interações entre humanos e robôs, enquanto muda os movimentos de um robô para desencadear uma resposta no ser humano com quem está interagindo.
Muitos especialistas acreditam que em breve, humanos e máquinas trabalharão juntos em uma variedade de campos, incluindo indústria e manufatura. Para permitir a automação eficiente e a colaboração humano-robô, Contudo, os pesquisadores precisarão desenvolver abordagens que alavanquem as habilidades humanas, como a tomada de decisões, destreza, flexibilidade e criatividade, combinando isso com a velocidade, precisão e poder associados aos robôs.
Na verdade, enquanto a automação completa seria muito cara, a fabricação realizada manualmente apenas por humanos é frequentemente lenta e sujeita a erros. O desenvolvimento de ferramentas que aprimoram a colaboração entre humanos e robôs é, portanto, importante. De acordo com RIA, esta será uma parte central da Quinta Revolução Industrial, também conhecido como Industry 5.0.
"Em nossa opinião, existem três desafios principais para a colaboração humano-robô na indústria. Eles são a segurança, confiança humana em automação e produtividade, "Shitij Kumar, um dos pesquisadores que realizou o estudo, disse TechXplore. "Todos esses são dependentes uns dos outros. Para enfrentar esses desafios, primeiro desenvolvemos uma configuração de colaboração homem-robô (HRC) como um sistema de sistemas que nos permitiria criar diferentes cenários de colaboração homem-robô e compreender e analisar as interações homem-robô. "
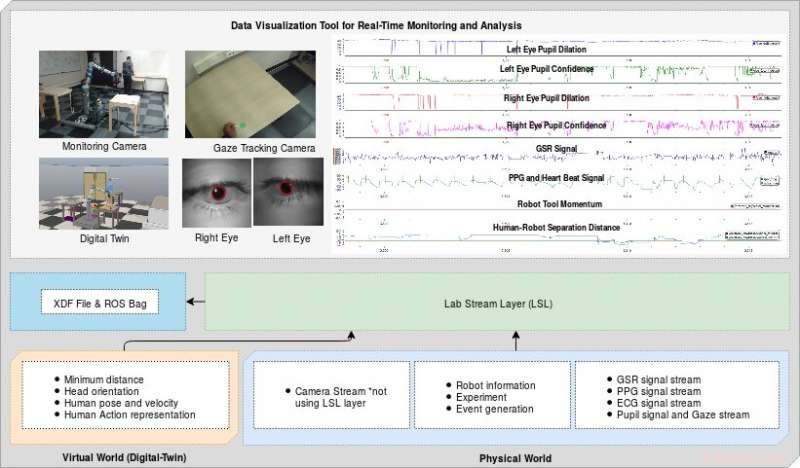
Um diagrama de sistema da implementação com base na estrutura proposta, representando a coleta de dados e monitoramento durante um experimento HRC. Crédito:Savur, Kumar &Sahin.
Como parte de seu Ph.D., sob a orientação do Dr. Ferat Sahin, o diretor do CMCRL, Kumar começou a desenvolver um sistema que muda o comportamento do robô com base na distância de separação homem-robô e ações no espaço de trabalho compartilhado. Nesse contexto, o comportamento de um robô é determinístico e previsível com base em regras.
Apesar da promessa mostrada por sua abordagem, ele descobriu que o feedback humano nem sempre ocorre, o que tornava mais difícil para seu sistema obter conformidade satisfatória do robô. A conformidade do robô significa essencialmente que o robô pode gerenciar as expectativas dos humanos com os quais está interagindo e se comunicar efetivamente com eles.
"Acreditamos que uma melhor conformidade do sistema que dá ao operador que trabalha com o robô uma sensação de controle e previsibilidade do comportamento do robô aumentaria sua confiança na automação, "e assim aumentar a produtividade da tarefa, "Kumar disse." No entanto, então começamos a nos perguntar, como você quantifica a 'confiança' ou o nível de conforto de um operador humano trabalhando com o robô? "
Kumar e seus colegas acreditam que monitorar sinais fisiológicos humanos, que são indicadores de estresse físico e mental, bem como outras emoções, durante uma tarefa que envolve interação humano-robô seria um passo na direção certa. Essa crença é apoiada por pesquisas anteriores que descobriram que esses sinais (conhecidos como respostas psicofisiológicas) são indicadores confiáveis para mudar o comportamento e o movimento do robô.

Sensores e dispositivos usados na implementação do protótipo. Os pesquisadores usaram um sistema de captura de movimento para monitorar o movimento humano e uma câmera para registrar o experimento. Eles também rastrearam o olhar humano usando Laboratórios de pupilas e respostas fisiológicas humanas, como dilatação da pupila, PPG, GSR, EEG \ e ECG registrados. Crédito:Savur, Kumar &Sahin.
Com isso em mente, Celal Savur, um Ph.D. Aluno da RIT's CMCRL, realizou um estudo para explorar os efeitos do movimento e comportamento do robô nas respostas psicofisiológicas humanas. O objetivo principal de seu estudo era entender quais mudanças no movimento de um robô resultam em respostas de "desconforto humano", como medo ou estresse.
"Para fazer isso, uma estrutura para um sistema que representa e registra o movimento do robô e o estado fisiológico humano simultaneamente era necessária, "Savur explicou." Uma vez que a relação entre o movimento do robô e o estado fisiológico humano é identificada, a resposta fisiológica humana pode ser usada como um feedback para controlar / atualizar diretamente o movimento / comportamento do robô. Esses sistemas são chamados de 'sistemas de computação fisiológica ". A computação fisiológica é um subconjunto do campo da computação afetiva frequentemente usado em jogos de computador, em que os jogos se adaptam em tempo real às respostas do jogador, para obter uma experiência de jogo mais interativa. "
Em seu estudo, Savur e Kumar se propuseram a desenvolver uma estrutura que pode monitorar as respostas psicofisiológicas humanas à medida que os usuários concluem tarefas que envolvem a colaboração humano-robô. Seu trabalho encontra-se na interseção entre a ciência da computação, robótica e psicofisiologia, um ramo da neurociência que busca compreender como o estado mental de uma pessoa e suas respostas fisiológicas interagem ou afetam uns aos outros.
A estrutura que eles desenvolveram se enquadra na categoria de 'computação fisiológica ". Este é um tipo de computação afetiva que incorpora a adaptação de software em tempo real à atividade psicofisiológica do usuário. a estrutura que eles propuseram pode ser usada para investigar como as mudanças no movimento do robô (por exemplo, velocidade e trajetória) afetam o operador humano em um ambiente industrial.
"Vamos considerar, por exemplo, que existem dois operadores trabalhando com um robô, operador A e B, "Kumar explicou." O operador A trabalhou por mais tempo e se sente confortável trabalhando com o robô, como ele / ela pode prever o comportamento do robô por experiência. O Operador B é novo e um pouco cético em relação ao movimento do robô. O comportamento do robô muda em termos de velocidade com que ele se move e a distância que ele mantém quando está perto do operador com base no estado fisiológico do operador e padrões de comportamento. Neste cenário, para uma melhor interação humano-robô, o robô pode se mover em velocidades mais altas trabalhando perto do operador A, e mova-se lentamente trabalhando com o operador B. À medida que o operador B ganha mais experiência, o movimento do robô pode se adaptar a ele, construindo confiança e afetando positivamente a produtividade geral. "
O estudo realizado pelos pesquisadores no CMCRL tinha dois objetivos principais. O primeiro era gerar um banco de dados de tarefas de colaboração entre humanos e robôs, registro de interações humano-robô. Eles então queriam usar este banco de dados para investigar como as respostas fisiológicas humanas podem ser usadas para afetar o movimento de um robô, impactando positivamente o processo de automação. Em outras palavras, seu objetivo era construir um sistema de computação fisiológica para a colaboração humano-robô em ambientes industriais e de manufatura.
"Nossa estrutura é essencialmente um sistema que representa e registra o movimento do robô e o estado fisiológico humano simultaneamente, "Kumar disse." Para registrar esta informação, a estrutura fornece interfaces para o robô, sensores como câmeras, sistema de captura de movimento e também para os dispositivos de aquisição de dados biológicos / biométricos. Como todos esses dispositivos funcionam em diferentes taxas de amostragem, esta estrutura ajuda na aquisição de dados síncronos e representação da colaboração humano-robô. "
Em configurações experimentais tradicionais de robótica social, sujeitos humanos são questionados sobre suas experiências e percepções durante ou após um experimento. Usando o feedback deles, os pesquisadores são então capazes de analisar e quantificar os dados subjetivos coletados durante o experimento.
"Métodos que interrompem o sujeito ou fazem o sujeito relembrar sua experiência, Contudo, nem sempre são capazes de manter a integridade do experimento ou representar com precisão os dados subjetivos, "Kumar explicou." Portanto, ao contrário dos métodos tradicionais, esta implementação da estrutura permite que o sujeito humano ou o investigador principal gere marcadores de evento conforme o experimento / tarefa de colaboração do robô humano (HRC) está sendo realizado. "
Sua estrutura pode gerar automaticamente marcadores de eventos com base na representação humano-robô em um mundo virtual, que é conhecido como gêmeo digital. Por exemplo, pode ajudar a identificar quando o robô e o humano estavam mais próximos um do outro durante a tarefa, quando o robô teve que parar ou foi interrompido por uma ação humana, o progresso da tarefa realizada pelo ser humano, eventos baseados em comandos ou controle pelo operador humano, um evento quando o robô estava trabalhando em velocidade máxima, e o início / fim de uma tarefa.
"Nossa estrutura também fornece uma interface de usuário para que os pesquisadores reproduzam e visualizem seus experimentos HRC, "Kumar disse." Além disso, permite que eles analisem e rotulem os dados coletados. A coleta contínua e síncrona de dados fisiológicos de vários dispositivos e sua interface com o controle do robô e a interface em um único ecossistema, permite uma representação completa do estado humano e do robô. Isso pode ajudar a entender a causa e o efeito entre o estado fisiológico humano e os movimentos do robô. "
Com o advento dos dispositivos vestíveis e da Internet das Coisas (IoT), os dados fisiológicos humanos se tornarão mais fáceis de coletar e, portanto, estarão prontamente disponíveis. A estrutura desenvolvida pela pesquisa pode, portanto, ser extremamente valiosa, pois é projetado para aproveitar esses dados para melhorar as interações entre humanos e robôs.
"Esta estrutura permite um registro contínuo de dados com geração de eventos embutidos e sincronização de sinal em sistemas distribuídos, podendo manter a integridade do experimento (recriando o cenário de uma tarefa em um ambiente industrial) e representar com precisão os dados subjetivos, "Kumar disse.
Kumar e seus colegas acreditam que um agente capaz de tal computação fisiológica (ou seja, que pode detectar respostas fisiológicas humanas e responder a elas) pode resultar em um sistema fechado de humano no circuito, onde usuários humanos e robôs em uma configuração HRC são monitorados e as informações são compartilhadas entre eles. Isso pode resultar em uma melhor comunicação, o que pode, em última análise, promover uma maior confiança na automação entre o público, ao mesmo tempo em que aumenta a produtividade. No futuro, os pesquisadores planejam disponibilizar os bancos de dados gerados em seu estudo para outros pesquisadores do HRI.
"Nossos próximos estudos se concentrarão no desenvolvimento de um aplicativo de interface de usuário completo do sistema de computação fisiológica para processamento de sinais de gravação, extração de informações e aplicação de algoritmo de aprendizado de máquina para fornecer feedback ao robô, "Kumar disse." O objetivo final deste trabalho é gerar um banco de dados que possa ser usado para aprofundar a compreensão de como as respostas fisiológicas humanas podem ser inferidas para resultar em um comportamento de movimento adaptativo do robô. "
© 2019 Science X Network