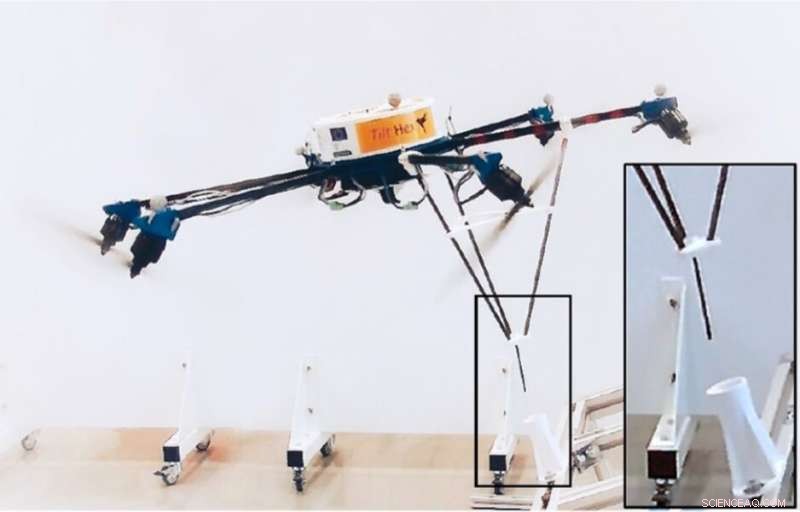
O Tilt-Hex (plataforma aérea NCFTP com hélices inclinadas desenvolvida no LAAS-CNRS) com o efetor final rigidamente acoplado. Observe como a interação ocorre longe e fora do centro do CoM do veículo. Crédito:Ryll et al.
Nos últimos anos, robôs aéreos se tornaram cada vez mais populares, com aplicações potenciais em uma variedade de campos. Muitos desses robôs são projetados principalmente para voar e coletar dados visuais de seu ambiente circundante, no entanto, alguns também são capazes de compreender, carregar ou mesmo montar objetos.
Equipar robôs aéreos com recursos avançados de interação física pode ser extremamente útil, pois isso permitiria que eles concluíssem tarefas mais complexas. Contudo, devido à natureza complexa da aerodinâmica, isso costuma ser muito desafiador, particularmente quando um veículo está perto de superfícies.
Pesquisadores da Universidade de Cassino e Southern Lazio, A Université de Toulouse e a University of Basilicata introduziram recentemente um novo paradigma que permite o controle de interação 6-D em robôs aéreos. A abordagem deles, descrito em um artigo publicado na SAGE's International Journal of Robotics Research , poderia pavimentar o caminho para o desenvolvimento de sistemas aéreos mais eficazes que funcionam melhor do que os robôs existentes em tarefas de manipulação aérea e interação física.
O novo paradigma proposto pelos pesquisadores, chamado efetor de extremidade móvel 6-D, pode ser aplicado à maioria, se não todos, sistemas totalmente acionados que são capazes de rastrear uma trajetória de pose completa com o efetor final. No estudo, foi aplicado especificamente ao Tilt-Hex, um novo robô aéreo, permitindo o controle independente de sua aceleração linear e angular. Em última análise, isso permitiu que o robô neutralizasse instantaneamente qualquer chave que encontrasse ao interagir com seu ambiente.
"Ao explorar sua atuação da hélice inclinada, o robô é capaz de controlar a pose 6-D completa (posição e orientação independentemente) e exercer uma chave completa (força e torque independentemente) com um atuador de extremidade rigidamente conectado, "os pesquisadores explicam em seu artigo." A interação é alcançada por meio de um esquema de controle de admitância em que um controle de loop externo governa o comportamento de admitância desejado (ou seja, conformidade / rigidez de interação, amortecimento, e massa) e um loop interno com base na dinâmica inversa garantiu o rastreamento de pose 6-D completo. "
O paradigma desenvolvido pelos pesquisadores estima as forças de interação usando um observador baseado em uma unidade de medição inercial (IMU) com base no momento aprimorado. Quando integrado com algoritmos robóticos conhecidos, pode obter estimativa de chave inglesa, bem como controle de movimento e interação. Interessantemente, este "sistema integrado" não requer um sensor de força em sua configuração básica e funciona mesmo com um conjunto mínimo de sensores.
Os pesquisadores avaliaram a eficácia do paradigma do efetor de extremidade voadora 6-D em uma série de experimentos, com foco em quatro estudos de caso:um toque rígido e deslizamento em uma superfície de madeira (ou seja, a tarefa de superfície deslizante), uma tarefa de peg-in-hole inclinada, um experimento de modelagem de admissão, e uma tarefa na presença de forças de interação variáveis no tempo. Essas avaliações produziram resultados muito promissores, demonstrando a versatilidade e robustez da abordagem mesmo na presença de incertezas ambientais.
Além disso, o novo paradigma foi encontrado para superar outras técnicas de manipulação aérea em suas capacidades, bem como em sua confiabilidade, complexidade e custos. Poderia, portanto, auxiliar no desenvolvimento de sistemas aéreos mais avançados que apresentam melhor desempenho em tarefas de manipulação e interação física.
"No futuro, buscaremos total autonomia do sistema, substituindo o sistema de captura de movimento por uma estimativa de estado totalmente integrada, "os pesquisadores escrevem em seu artigo." Além disso, vamos trabalhar na diferenciação de forças de contato na ponta da ferramenta e distúrbios na plataforma (por exemplo, rajadas de vento). "
© 2019 Science X Network