Os pesquisadores usam a física dos fluxos de ar para localizar vazamentos gasosos mais rapidamente em cenários complexos
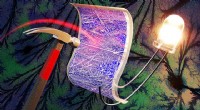
 p Este robô pode descobrir a origem de um vazamento de etanol de uma forma inteligente. Em vez de apenas seguir o cheiro mais forte, o robô conecta as medições de concentração e fluxo de ar em uma equação diferencial parcial complexa e então decide onde é a posição mais útil para fazer outra medição. Ao repetir este processo, ele pode encontrar uma fonte de etanol em apenas uma dúzia ou duas tentativas em um ambiente complexo com fontes múltiplas. Crédito:Reza Khodayi-mehr
p Este robô pode descobrir a origem de um vazamento de etanol de uma forma inteligente. Em vez de apenas seguir o cheiro mais forte, o robô conecta as medições de concentração e fluxo de ar em uma equação diferencial parcial complexa e então decide onde é a posição mais útil para fazer outra medição. Ao repetir este processo, ele pode encontrar uma fonte de etanol em apenas uma dúzia ou duas tentativas em um ambiente complexo com fontes múltiplas. Crédito:Reza Khodayi-mehr
p Engenheiros da Duke University estão desenvolvendo um sistema robótico inteligente para farejar pontos críticos de poluição e fontes de vazamentos tóxicos. Sua abordagem permite que um robô incorpore cálculos feitos em tempo real para levar em conta os complexos fluxos de ar de espaços confinados, em vez de simplesmente 'seguir seu nariz'. p "Muitas abordagens existentes que empregam robôs para localizar fontes de partículas transportadas pelo ar dependem de suposições educadas, mas simplistas, de inspiração biológica. ou técnicas heurísticas, que conduzem os robôs contra o vento ou seguem concentrações crescentes, "disse Michael M. Zavlanos, a Mary Milus Yoh e Harold L. Yoh, Jr. Professor Associado de Engenharia Mecânica e Ciência dos Materiais na Duke. "Esses métodos geralmente podem localizar apenas uma única fonte em espaço aberto, e eles não podem estimar outros parâmetros igualmente importantes, como taxas de liberação. "
p Mas em ambientes complexos, esses métodos simplistas podem enviar os robôs em perseguições de ganso selvagem para áreas onde as concentrações são artificialmente aumentadas pela física dos fluxos de ar, não porque eles sejam a fonte do vazamento.
p “Se alguém está fumando fora, não demora muito para encontrá-los apenas seguindo seu nariz, porque não há nada que impeça as correntes de ar de serem previsíveis, "disse Wilkins Aquino, o Anderson-Rupp Professor de Engenharia Mecânica e Ciência dos Materiais na Duke. “Mas coloque o mesmo cigarro dentro de um escritório e de repente fica muito mais difícil por causa das correntes de ar irregulares criadas pelos corredores, cantos e escritórios. "
p Em um artigo recente publicado online no
Transações IEEE em robótica , Zavlanos, Aquino e o recém-formado Ph.D. O graduado Reza Khodayi-mehr, em vez disso, aproveita as vantagens da física por trás desses fluxos de ar para rastrear a fonte de uma emissão com mais eficiência.
Para se ter uma ideia da complexidade das correntes de ar dentro de uma simples caixa em forma de U, os pesquisadores usaram giz vermelho para seguir as nuvens e os movimentos do ar. São complexidades como essas que tornam difícil para os robôs simplesmente "seguirem seu nariz" para localizar fontes de vazamentos gasosos. Os pesquisadores da Duke construíram um robô que, em vez de apenas seguir o cheiro mais forte, está conectando medições de concentração e fluxo de ar em uma equação diferencial parcial complexa e, em seguida, decidindo onde é a posição mais útil para fazer outra medição. Ao repetir este processo, ele pode encontrar uma fonte de etanol em apenas uma dúzia ou duas tentativas em um ambiente complexo com fontes múltiplas. Crédito:Reza Khodayi-mehr p Sua abordagem combina modelos baseados na física do problema de identificação de fonte com algoritmos de planejamento de caminho para robótica em um ciclo de feedback. Os robôs medem as concentrações de contaminantes no ambiente e usam essas medições para calcular gradativamente de onde os produtos químicos estão realmente vindo.
p "A criação desses modelos baseados na física requer a solução de equações diferenciais parciais, que é computacionalmente exigente e torna seu aplicativo integrado pequeno, robôs móveis muito desafiadores, "disse Khodayi-mehr." Tivemos que criar modelos simplificados para tornar os cálculos mais eficientes, o que também os torna menos precisos. É uma troca desafiadora. "
p Khodayi-mehr construiu uma caixa retangular com uma parede quase dividindo o espaço ao meio para criar um corredor em forma de U em miniatura que imita um espaço de escritório simplificado. Um ventilador bombeia ar para o corredor em uma extremidade do U e de volta para fora da outra, enquanto o etanol gasoso é lentamente vazado em um dos cantos. Apesar da simplicidade da configuração, as correntes de ar criadas dentro são turbulentas e confusas, criando um problema de identificação de fonte difícil para qualquer robô farejador de etanol resolver.
p Mas o robô resolve o problema de qualquer maneira.
p O robô faz uma medição de concentração, funde com medições anteriores, e resolve um problema de otimização desafiador para estimar onde está a fonte. Em seguida, ele descobre o local mais útil para fazer a próxima medição e repete o processo até que a fonte seja encontrada.
p "Ao combinar modelos baseados na física com planejamento de caminho ideal, podemos descobrir onde está a fonte com muito poucas medições, "disse Zavlanos." Isso ocorre porque os modelos baseados na física fornecem correlações entre medições que não são contabilizadas em abordagens puramente baseadas em dados, e o planejamento de caminho ideal permite que o robô selecione aquelas poucas medições com o maior conteúdo de informação. "
p "Os modelos baseados na física não são perfeitos, mas ainda carregam muito mais informações do que apenas os sensores, "acrescentou Aquino." Eles não precisam ser exatos, mas permitem que o robô faça inferências com base no que é possível dentro da física dos fluxos de ar. Isso resulta em uma abordagem muito mais eficiente. "
p Esta série complexa de resolução de problemas não é necessariamente mais rápida, mas é muito mais robusto. Ele pode lidar com situações com várias fontes, o que atualmente é impossível para abordagens heurísticas, e pode até medir a taxa de contaminação.
p O grupo ainda está trabalhando para criar algoritmos de aprendizado de máquina para tornar seus modelos ainda mais eficientes e precisos ao mesmo tempo. Eles também estão trabalhando para estender essa ideia para programar uma frota de robôs para conduzir uma busca metódica em uma grande área. Embora eles não tenham tentado a abordagem de grupo na prática ainda, eles publicaram simulações que demonstram seu potencial.
p "Mover-se de um ambiente de laboratório com configurações controladas para um cenário mais prático, obviamente, requer abordar outros desafios também, "disse Khodayi-mehr." Por exemplo, em um cenário do mundo real, provavelmente não saberemos a geometria do domínio que entra. Essas são algumas das direções de pesquisa em andamento nas quais estamos trabalhando atualmente. "
p "Identificação de fonte ativa baseada em modelo em ambientes complexos." Reza Khodayi-mehr, Wilkins Aquino, Michael M. Zavlanos.
Transações IEEE em robôs , 2019.