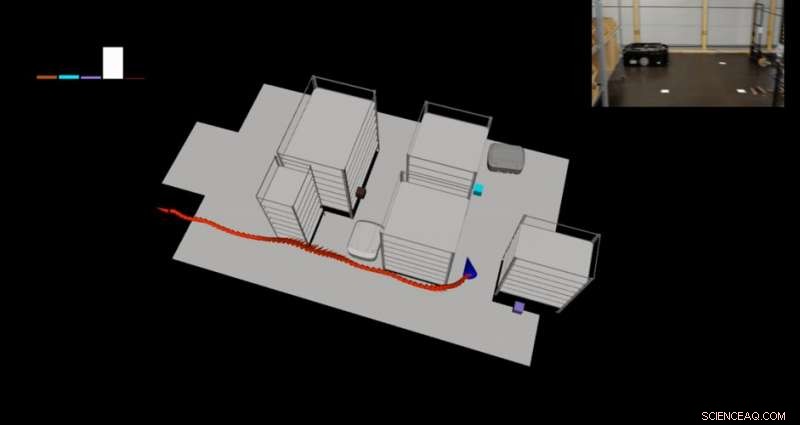
A trajetória do trabalhador humano na área de teste do Armazém. Os dados de localização são fornecidos pelo algoritmo de localização Hololens. No canto superior direito, a visão em primeira pessoa do trabalhador pode ser vista. No canto superior esquerdo estão as probabilidades do trabalhador ir para uma meta específica. Crédito:Petkovic et al.
O rápido crescimento dos negócios de logística gerou a necessidade de sistemas de armazenamento mais evoluídos e eficientes. Os avanços na robótica podem ajudar a atender a essas necessidades, automatizando tarefas que atualmente são concluídas por humanos, acelerando significativamente o fluxo de trabalho.
Para operar com segurança e eficiência, Contudo, assistentes de depósito de robôs devem ser capazes de reconhecer as intenções de seus operadores humanos. Pesquisadores da Universidade de Zagreb e do Instituto de Tecnologia de Karlsruhe desenvolveram recentemente um algoritmo de estimativa de intenção humana com base nos princípios da teoria da mente (ToM). ToM é a capacidade humana de reconhecer a intenção, crenças, desejos, emoções, e estados mentais em outros humanos.
"Nossa pesquisa nasceu do projeto SafeLog da UE Horizon 2020, que visa permitir a entrada segura de humanos em armazéns totalmente automatizados, onde robôs móveis carregam prateleiras, sem desligar toda a frota de robôs, "David Puljiz, um dos pesquisadores que realizou o estudo, disse TechXplore. "Isso é feito com o uso de um colete de segurança especialmente projetado e um dispositivo AR para orientar e ajudar o trabalhador a navegar neste ambiente."
Para aumentar a segurança, o sistema de segurança de armazém idealizado pelos pesquisadores planeja o caminho de um robô de forma que não colida com o de trabalhadores humanos. Para funcionar, ele precisa saber para onde o operador humano está indo, particularmente se ele não estiver indo para um local previamente combinado.
Puljiz e seus colegas observaram o movimento de trabalhadores humanos individuais em ambientes de depósito e os validaram com relação a seus locais de meta, usando uma abordagem chamada planejamento baseado em diagrama de Voronoi generalizado. Essas observações foram então alimentadas para um modelo de Markov oculto, que pode estimar as intenções de um trabalhador online enquanto ele navega em ambientes variáveis.
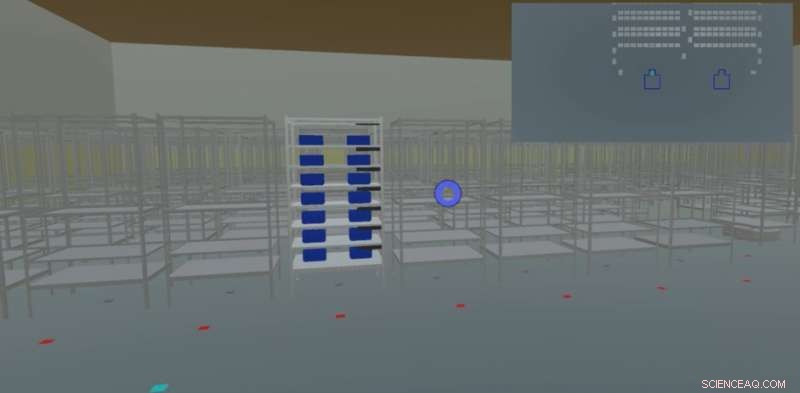
A visão em primeira pessoa no ambiente de RV, usado para testar o algoritmo em cenários de grande escala. No canto superior esquerdo, uma visão panorâmica da área ao redor do trabalhador pode ser vista, incluindo os robôs móveis. Crédito:Puljiz et al.
"O algoritmo de estimativa de intenção humana baseado em ToM proposto para armazéns robotizados flexíveis é baseado na validação de movimento de modelo oculto de Markov, "Tomislav Petkovic, outro pesquisador envolvido no estudo, disse TechXplore. "Nós observamos o movimento do trabalhador e o validamos com relação aos locais do objetivo usando o planejamento de caminho baseado no diagrama de Voronoi generalizado. Essas observações são então processadas pela estrutura do modelo oculto de Markov, que estima as intenções do trabalhador online e é capaz de lidar com ambientes em mudança. O laboratório LAMOR da Universidade de Zagreb desenvolveu o backend do algoritmo:validação de movimento e estimativa de objetivo. "
Para avaliar a eficácia do modelo, O IPR Lab do Karlsruhe Institute of Technology realizou experimentos de estimativa de intenção em um pequeno ambiente de teste de armazém, usando óculos AR Microsoft Hololens. Os pesquisadores realizaram avaliações adicionais em armazéns virtuais de grande escala, usando a tecnologia VR. Eles descobriram que sua estrutura poderia estimar efetivamente as intenções dos trabalhadores do armazém, com notável precisão.
"Acho que o aspecto mais significativo do nosso estudo é que os dispositivos de RA podem ser usados para mais do que entretenimento ou marketing e podem realmente ser úteis em ambientes industriais, "Puljiz disse." O campo de pesquisa é bastante novo e há muitas possibilidades nesta área. "
No futuro, o algoritmo de estimativa de intenção humana em tempo real desenvolvido por Puljiz e seus colegas pode aumentar a segurança e a eficiência dos sistemas robóticos baseados em warehouse. Por exemplo, poderia ajudar no desenvolvimento de robôs mais responsivos que podem estimar as intenções dos operadores humanos ao seu redor, adaptando e planejando suas rotas em conformidade.
"Em trabalhos futuros, poderíamos estender o algoritmo para espaços 3D e seguir a direção do olhar em 3D para determinar, por exemplo, se o trabalhador pretende pegar o objeto errado ou se ele está preocupado com a aproximação de um robô, "Puljiz disse." Existem muitas outras possibilidades, incluindo integrações de rastreamento manual. "
© 2018 Science X Network