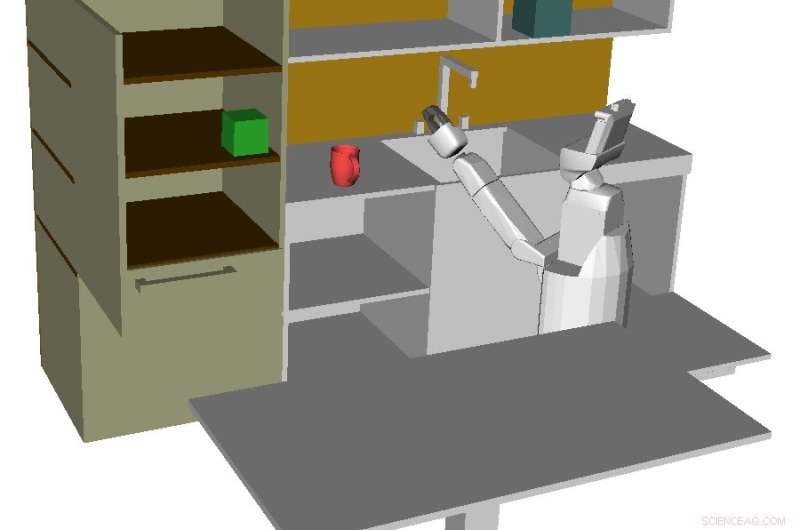
Ambiente de simulação para um robô no qual os pesquisadores testaram seu algoritmo. Crédito:Dai et al.
Pesquisadores do Laboratório de Ciência da Computação e Inteligência Artificial do MIT desenvolveram recentemente um sistema de planejamento de movimento restrito ao acaso que pode ser aplicado a robôs de alto grau de liberdade (DOF) sob incerteza de movimento e em casos de informações de estado imperfeitas. A abordagem deles, descrito em um artigo pré-publicado no arXiv, pode encontrar trajetórias viáveis que satisfaçam um limite especificado pelo usuário sobre a probabilidade de colisão.
"A principal inspiração deste trabalho é a limitação dos planejadores de movimento restritos ao acaso existentes, "Siyu Dai, um dos pesquisadores que realizou o estudo, disse TechXplore. "Eu descobri que muitos planejadores de movimento de última geração exigem a formulação de obstáculos em formas convexas, o que é inviável para o planejamento em domínios de alta dimensão, por exemplo, planejamento de movimento do manipulador. Outros planejadores de movimento restritos por acaso convencionais são baseados em métodos de árvore aleatória de exploração rápida (RRT), dos quais a velocidade na tarefa de planejamento de alta dimensão é muito preocupante. "
Para lidar com as limitações dos sistemas de planejamento de movimento existentes, Dai e seus colegas se propuseram a desenvolver um planejador de movimento reativo rápido e restrito ao acaso. Esse planejador de movimento seria particularmente útil para robôs que completam tarefas que estão sujeitas a graves perturbações e observações limitadas, como a manipulação subaquática.
Chekov probabilístico (p-Chekov), o sistema que eles criaram, é baseado em seu trabalho anterior em planejamento de movimento determinístico, que integrou a otimização da trajetória em uma estrutura de roteiro esparsa. P-Chekov usa uma abordagem de planejamento de movimento gaussiano linear quadrático para estimar a distribuição de probabilidade de estado de um robô. Em seguida, aplica teorias de quadratura para estimativas de risco de colisão de waypoint e adapta abordagens de alocação de risco para atribuir probabilidades permitidas de falha para waypoints.
"O sistema de planejamento de movimento restrito ao acaso desenvolvido em nosso artigo inclui um componente de planejamento determinístico e um componente de avaliação de risco, "Dai explicou." O componente determinístico primeiro constrói um roteiro que consiste em viáveis, bordas livres de colisão com base nas informações do ambiente. Nas tarefas de planejamento online, ele então procura uma trajetória viável no roteiro e a suaviza com um otimizador de trajetória. Essa trajetória é então passada para o componente de avaliação de risco, que avalia o risco de colisão com base na estimativa de ruídos. "
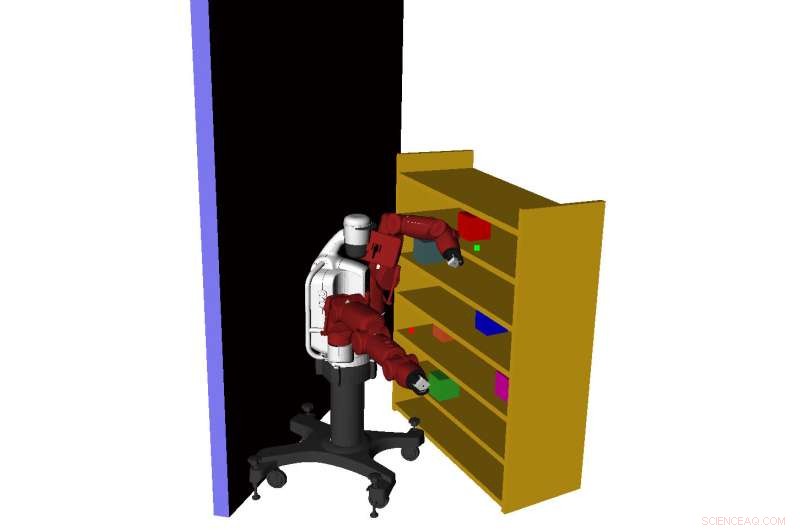
Ambiente de simulação para um robô no qual os pesquisadores testaram seu algoritmo. Crédito:Dai et al.
Se o risco de colisão calculado pelo componente de avaliação de risco de P-Chekov violar a restrição de chance predefinida, a trajetória é retornada ao planejador determinístico e novas restrições são adicionadas, a fim de encontrar uma trajetória com menor risco. Se o risco de colisão satisfizer a restrição de chance, o sistema simplesmente executa a trajetória proposta.
Ao contrário dos planejadores de movimento cientes de risco existentes, P-Chekov pode ser aplicado a tarefas de planejamento robótico de alto DOF, sem ter que formular obstáculos em formas convexas. Em testes de simulação, o sistema reduziu efetivamente os riscos de colisão e satisfez as restrições de chance especificadas pelo usuário em cenários de planejamento do mundo real comumente encontrados por robôs de alta dimensão.
"Estabelecemos um sistema de planejamento de movimento de restrição de chance que pode incorporar tarefas de planejamento de movimento de alta dimensão, "Disse Dai." Isso significa que o planejamento de movimento restrito ao acaso não está mais restrito a tarefas de direção, mas agora pode ser aplicado a robôs móveis com braços, por exemplo, robôs de suporte humano e manipuladores subaquáticos, que pode fazer planos com base em diferentes requisitos de nível de risco. "
No futuro, P-Chekov pode ser aplicado a uma variedade de robôs de alta dimensão, melhorando seu planejamento de movimento sob incerteza. Apesar de seus resultados promissores, os resultados da fase de planejamento do sistema às vezes podem ser excessivamente conservadores, devido a alocações de risco subótimas e um número limitado de nós de quadratura.
Em testes preliminares, os pesquisadores já começaram a avaliar técnicas que podem aumentar a utilidade do sistema. Enquanto isso, eles também estão planejando melhorar o algoritmo de estimativa de probabilidade de colisão de P-Chekov, para aumentar ainda mais sua capacidade de evitar conflitos.
"A principal direção de nossos próximos estudos será melhorar o algoritmo de avaliação de risco, a fim de acelerar todo o processo de planejamento de movimento e tornar o planejador de rápida reatividade, "Dai disse.
© 2018 Science X Network