Aparência de HRP-5P (esquerda) e HRP-5P com aprox. Placa de 13 kg (direita). Crédito:Ciência e Tecnologia Industrial Avançada
Os pesquisadores desenvolveram um protótipo de robô humanóide, HRP-5P, destinado a realizar trabalhos pesados de forma autônoma ou em ambientes perigosos.
Com 182 cm, Robô humanóide de 101 kg, O HRP-5P foi desenvolvido com base nas tecnologias da série HRP, incorporando novas tecnologias de hardware. Dentro da série, possui capacidades físicas insuperáveis. Sua inteligência de robô compreende medição ambiental e reconhecimento de objetos, planejamento e controle de movimento de corpo inteiro, descrição de tarefas e gerenciamento de execução, e tecnologias de sistematização altamente confiáveis. Alojar a inteligência neste corpo permitiu a instalação autônoma da placa de gesso pelo robô, que é um exemplo típico de trabalho pesado em canteiros de obras. O uso de HRP-5P, como uma plataforma de desenvolvimento, em colaboração entre a indústria e a academia, promete acelerar a P&D em direção à aplicação prática de robôs humanóides em canteiros de obras e na montagem de grandes estruturas, como aeronaves e navios.
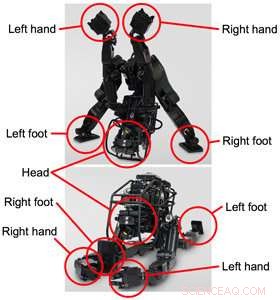
Figura 1. Curvando-se para frente (topo) e com as pernas abertas para frente e para trás (embaixo). Crédito:Ciência e Tecnologia Industrial Avançada
O declínio da taxa de natalidade no Japão deve causar uma séria escassez de mão de obra na construção e em muitas outras indústrias. É imperativo resolver esse problema usando tecnologias de robô. Essas tecnologias também fornecem uma alternativa atraente para ter trabalhadores da construção civil nos canteiros de obras, instalações de aeronaves, ou estaleiros realizam trabalhos pesados que são potencialmente perigosos. Contudo, tem sido difícil tornar esses canteiros de obras em grande escala adequados para robôs, o que desencorajou a introdução de robôs. Porque robôs humanóides se parecem fisicamente com pessoas, eles podem trabalhar sem exigir mudanças ambientais, possivelmente aliviando os trabalhadores de trabalho pesado.
No desenvolvimento da série HRP, AIST tem colaborado com várias empresas do setor privado, incluindo Kawada Industries Inc. (agora Kawada Robotics Corp.), e desenvolveu tecnologias básicas para aplicação prática. HRP-2 era capaz de andar bípede, deitado, em pé, caminhando em caminhos estreitos, e outras ações. O HRP-3 pode andar em superfícies escorregadias e apertar parafusos em pontes por controle remoto. A pesquisa de robôs humanóides de resposta a desastres em andamento na AIST desde 2011 levou a uma versão revisada do HRP-2 com capacidades físicas aprimoradas (como o comprimento dos membros, amplitude de movimento, e produção conjunta), que poderia andar em terrenos acidentados, gire as válvulas, e realizar outras tarefas de forma semi-autônoma com base na medição ambiental 3-D. Contudo, suas capacidades físicas ainda eram insuficientes para trabalho pesado, como instalação de placas de gesso, e faltava grau suficiente de liberdade e amplitude móvel suficiente de articulações para emular o movimento humano em ambientes complexos. Para este fim, A AIST buscou o desenvolvimento do robô humanóide, HRP-5P, com capacidades físicas que lhe permitem substituir pessoas que realizam trabalhos pesados.
Além disso, HRP-5P herda as tecnologias da série HRP e utiliza tecnologia patenteada da Honda Motor Co., Ltd.
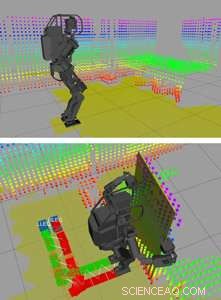
Figura 2. Mapa da área circundante (em cima) e plano de caminhada (em baixo). Crédito:Ciência e Tecnologia Industrial Avançada
Uma parte do desenvolvimento do HRP-5P foi apoiado por P&D encomendado pela New Energy and Industrial Technology Development Organization (NEDO), "P&D em sistemas de robôs humanóides altamente confiáveis que podem funcionar em ambientes não estruturados" em "robôs humanóides autônomos (campo de tecnologias de robô de elemento inovador)" de "P&D em tecnologias de robôs centrais de próxima geração, "e subsídio para pesquisa científica da Sociedade Japonesa para a Promoção da Ciência, "Objetivando o planejamento de movimento de corpo inteiro com base na aquisição de modelo ambiental que permite que robôs humanóides se adaptem a ambientes desconhecidos" (projeto de pesquisa número JP17H07391).
O protótipo do robô humanóide HRP-5P foi desenvolvido com um corpo robusto e inteligência avançada para trabalhar de forma autônoma e fornecer uma fonte alternativa de trabalho pesado.
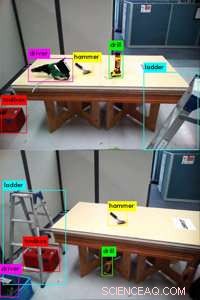
Figura 3. Exemplo de detecção de objetos. Crédito:Ciência e Tecnologia Industrial Avançada
Integration of these technologies has enabled autonomous gypsum board installation in which HRP-5P handles and carries large, heavy objects at a simulated residential construction site independently.
Especificamente, this work involves the following series of operations.
R&D on robot intelligence will be promoted using this platform, targeting an alternative source of autonomous manual labor at residential or office building sites, and in assembly of large structures such as aircraft and ships. This will compensate for labor shortages, free people from heavy labor, and help them focus on more high-value-added work.
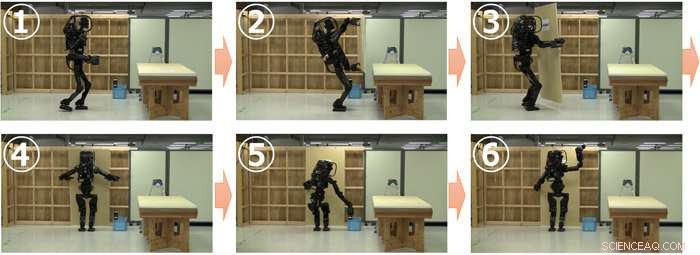
Figure 4. Autonomous gypsum board installation by HRP-5P. Credit:Advanced Industrial Science and Technology