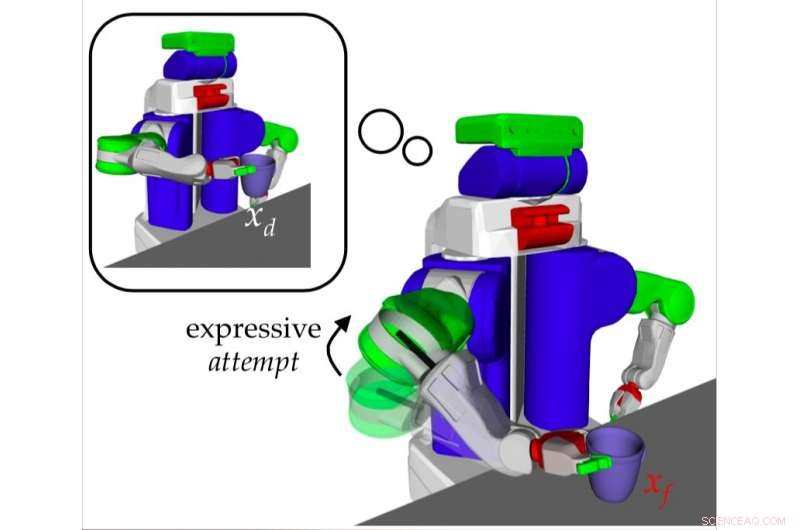
O método desenvolvido pelos pesquisadores gera um movimento de tentativa destinado a se assemelhar a uma execução bem-sucedida (por exemplo, mover o efetor final de xf para xd) enquanto obedece às restrições das limitações do robô. Neste exemplo, levanta o cotovelo para comunicar que está tentando levantar o copo, mas o copo é muito pesado para ser levantado por ele. Crédito:Kwon, Huang e Dragan.
Pesquisadores da Cornell University e da University of California, Berkeley, desenvolveram um método para gerar automaticamente movimentos com os quais os robôs podem expressar sua incapacidade de completar uma determinada tarefa. Esses movimentos gerados comunicam claramente qual tarefa o robô não pode completar e por que não é capaz de concluí-la.
“Ao interagir com robôs, é importante que os humanos tenham expectativas precisas sobre as capacidades do robô, "Minae Kwon, um dos pesquisadores que realizou o estudo, disse TechXplore. "Uma maneira de definir expectativas precisas é entender o que os robôs são incapazes de fazer e por quê."
Atualmente, a maioria das falhas do robô é extremamente pouco informativa. Em outras palavras, quando o robô não consegue completar uma tarefa, ele pode parar abruptamente no meio de uma ação ou até mesmo se recusar a iniciar a tarefa em primeiro lugar. Isso torna difícil para os humanos entender a causa da falha do robô, bem como generalizar suas habilidades.
"Queríamos encontrar uma maneira pela qual os robôs pudessem comunicar de forma mais inteligente suas incapacidades (ou seja, o que eles estão tentando fazer e por que falhará), mesmo antes que aconteça uma falha, "Kwon disse." Especificamente, focamos nas incapacidades relacionadas às tarefas de planejamento de movimento (por exemplo, levantar um copo, empurrando uma porta), pois queríamos resolver esse problema usando movimento expressivo. "
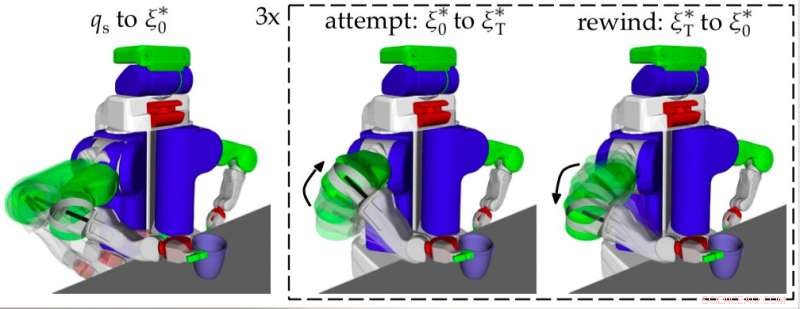
Para uma determinada tarefa incompleta, o robô primeiro executa a tarefa até o ponto de falha (esquerda), ponto em que executa a trajetória de tentativa ξ ∗ (centro). Para enfatizar este movimento, o robô então executa o reverso de ξ ∗ para retroceder para ξ ∗ 0 (direita), e repete isso mais duas vezes. Crédito:Kwon, Huang e Dragan.
Kwon, seus colegas Sandy Huang e seu consultor Anca Dragan trataram desse problema no contexto da otimização de trajetória. Sua abordagem minimiza a semelhança entre o movimento que expressa a incapacidade e o que permitiria ao robô executar a tarefa com sucesso, ao mesmo tempo, considerando as limitações físicas do robô. Quando os pesquisadores avaliaram diferentes medidas de similaridade, eles descobriram que um em particular se generalizou bem para uma ampla gama de tarefas, produzindo movimentos expressivos que são ajustados para tarefas individuais.
"Geramos um movimento de tentativa, ou um movimento em que o robô tenta o seu melhor para completar a trajetória que teria seguido, que está sujeito a uma restrição, "Kwon explicou." Seguir a trajetória desejada ilustra o objetivo do robô e a restrição ilustra a falha. Para comunicar a incapacidade, nós retrocedemos e repetimos consecutivamente esses movimentos de tentativa. "
O método empregado pelos pesquisadores gera automaticamente movimentos que expressam a incapacidade do robô, comunicar o que está tentando alcançar e as razões por trás de seu fracasso. Isso poderia melhorar a comunicação entre usuários finais e robôs, facilitando sua colaboração em uma ampla gama de tarefas.
"Achamos que é importante que as pessoas não sejam apenas capazes de reconhecer o objetivo pretendido do robô e a causa da incapacidade de forma mais clara em comparação com outras abordagens, mas que nossos movimentos também criaram uma imagem positiva do robô, 'Kwon disse. "Por exemplo, as pessoas estavam mais dispostas a ajudar o robô e colaborar com ele. Esperamos que essas implicações positivas para a colaboração humano-robô ajudem a melhorar a maneira como interagimos com os robôs. "
No futuro, o método desenvolvido por Kwon, Huang e Dragan podem ajudar no desenvolvimento de robôs mais comunicativos, aumentando ainda mais as interações entre humanos e máquinas. Os pesquisadores agora planejam desenvolver ainda mais sua abordagem, a fim de gerar movimentos para uma variedade mais ampla de falhas de tarefas.
"Nós apenas almejamos um subconjunto de possíveis incapacidades que o robô pode ter, deixando de fora outros tipos de falhas, como falhas de percepção, "Kwon disse." Encontrar maneiras criativas de expressar diferentes tipos de incapacidades é um desafio interessante que deixamos para trabalhos futuros. "
© 2018 Science X Network