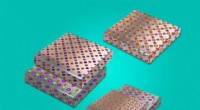
Comparação da saída do sistema de mapeamento online com e sem deterioração do mapa em uma situação de ultrapassagem. As imagens nas figuras (a) e (b) mostram uma visualização 3D da ultrapassagem. Nessas imagens, os pontos azuis representam os pontos das leituras do Velodyne e as caixas vermelhas representam as células com alta probabilidade de ocupação. As imagens restantes (figuras (c) a (h)) mostram o mapa online da IARA na mesma situação (diferente de (a) e (b), regiões azuis no mapa são células não tocadas pelos sensores). Se a degradação do mapa não for empregada, células à esquerda do carro (retângulo vermelho) são marcadas como obstáculos e não são soltas novamente porque caem em um ponto cego do sensor (ver figuras (c), (e) e (g)). Se a degradação do mapa for empregada, as células marcadas como obstáculos desaparecem lentamente à medida que decaem para os valores do mapa off-line (ver figuras (d), (f), e (h)). Crédito:De Souza et al.
Pesquisadores do Laboratório de Computação de Alto Desempenho (LCAD) da Universidade Federal do Espírito Santo (UFES), no Brasil, desenvolveram uma nova estratégia para corrigir imperfeições em mapas de grade de ocupação, corrigindo probabilidades de ocupação inválidas de células de mapa que não são observáveis por sensores. Esta nova técnica, chamado decadência do mapa, é inspirado pelo conhecimento empírico atual da arquitetura da memória do cérebro humano.
"O objetivo de longo prazo de nossa equipe de pesquisa no LCAD é entender como o cérebro humano funciona, “Alberto Ferreira De Souza, um dos pesquisadores que realizou o estudo, disse TechXplore. "É uma meta muito ambiciosa, Eu sei, então, a fim de lidar com isso, fizemos o que é normal na ciência. Isso é, pretendíamos entender o cérebro como uma série de marcos e começamos com o primeiro. No nosso caso, era tentar entender a cognição visual, nossa habilidade de entender o mundo e idéias sobre o mundo usando nosso senso de visão. "
Este ambicioso projeto de pesquisa começou há cerca de 15 anos, inicialmente com o uso de imagens estáticas e depois com imagens dinâmicas tiradas por câmeras colocadas em robôs móveis. Mais tarde, os pesquisadores começaram a estudar carros autônomos e, eventualmente, construíram seus próprios, denominado IARA (Intelligent Autonomous Robotic Automobile).
"Nesse trabalho, buscamos inspiração no cérebro para propor melhorias nos algoritmos existentes envolvidos no manuseio de mapas de carros autônomos, “Disse De Souza.“ O cérebro e suas funções foram analisados do ponto de vista da psicologia cognitiva; em particular, os processos cognitivos relacionados à memória em seus diferentes níveis:memória sensorial, memória de curto prazo (ou memória de trabalho), e memória de longo prazo. "
Os humanos são capazes de armazenar informações em sua memória e relembrá-las em momentos de necessidade. Essa habilidade fundamental permite a execução de procedimentos físicos e a busca de objetivos de longo prazo. Tão importante quanto lembrar coisas do passado, Contudo, é a capacidade de esquecer informações irrelevantes, focalizando a atenção no que pode contribuir para resolver as tarefas ou problemas atuais.
"Analisamos as semelhanças entre a arquitetura de memória visual que se acredita existir no cérebro humano e o processo de construção de mapas em carros autônomos, "De Souza disse." Inspirado por essas semelhanças, propusemos uma nova estratégia para remover ruído online de mapas de grade de ocupação, que chamamos de deterioração do mapa. "
A deterioração do mapa funciona mesclando informações sensoriais obtidas durante o tempo de execução (ou seja, quando um sistema está online) com dados anteriores de um mapa de alta precisão construído offline. Os dados online ou offline são enfatizados conforme as células do mapa são observadas por sensores ou não.
"As células observadas por sensores são atualizadas usando técnicas tradicionais de mapeamento de grade de ocupação, "Explicou De Souza." As células não observadas são ajustadas para que suas probabilidades de ocupação tendam aos valores encontrados no mapa off-line. O efeito desse ajuste é um desbotamento aparente, ou decadência, de informações online em regiões não observáveis do mapa, enquanto as informações off-line de alta precisão são mantidas. "
A ideia por trás dessa estratégia é que a informação disponível mais precisa sobre uma célula de mapa não observável é o valor encontrado no mapa offline de alta precisão. O UFES aplicou o decaimento do mapa ao seu veículo autônomo IARA e os testes iniciais produziram resultados muito promissores.
"A deterioração do mapa remove imperfeições dos mapas de grade de ocupação online, "disse de Souza." Essas imperfeições têm várias causas. Por exemplo, quando um objeto dinâmico cruza as células de um mapa, suas probabilidades de ocupação aumentam. Devido ao movimento do carro autônomo, essas células não podem mais ser observadas, levando a um traço no mapa que não é apagado. "
Souza explicou que o mesmo problema também pode ocorrer quando um falso obstáculo é detectado, devido a um erro natural do sensor. Se as células não forem observadas novamente, seja porque o robô está se movendo ou porque essas células estão localizadas dentro de um ponto cego sensorial, a probabilidade de ocupação não será corrigida.
A deterioração do mapa remove efetivamente essas imperfeições, usando estratégias que espelham os processos da memória humana. Assim como o cérebro humano, ele libera informações que não são mais necessárias e dá sentido a dados sensoriais incompletos, preenchendo-os com conhecimento de longo prazo, que é armazenado no mapa offline preciso.
"Sempre tentamos implementar uma solução de última geração para um problema e, em seguida, tentamos reimplementá-la usando redes neurais, nosso paradigma preferido para emular o cérebro, "De Souza disse." Como trabalho futuro, estudaremos como implementar todo o processo de mapeamento, incluindo a decadência do mapa, usando redes neurais profundas. "
© 2018 Tech Xplore