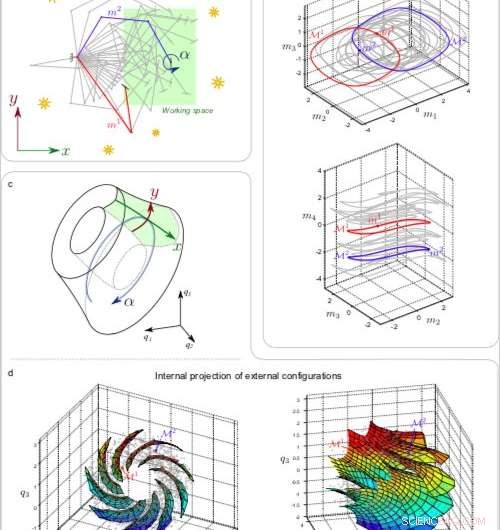
a) 1% das 2500 configurações do braço exploratório mi. b) Duas projeções 3D de 1% dos conjuntos Mi embutidos no espaço do motor 4D. c) Esquema da variedade projetada e captura de parâmetros externos. d) Projeção em 3D dos 2500 manifolds Mi (pontos cinza) com superfícies correspondentes a translações no espaço de trabalho para diferentes orientações retinais. Crédito:Laflaquière et al.
Pesquisadores da Sorbonne Universités e do CNRS investigaram recentemente os pré-requisitos para o surgimento de noções espaciais simplificadas em sistemas robóticos, com base no fluxo sensório-motor de um robô. Seu estudo, pré-publicado no arXiv, faz parte de um projeto maior, em que eles exploraram como noções perceptivas fundamentais (por exemplo, corpo, espaço, objeto, cor, etc.) pode ser instilado em sistemas biológicos ou artificiais.
Até aqui, os projetos de sistemas robóticos refletiram principalmente a maneira como os seres humanos percebem o mundo. Projetar robôs guiados exclusivamente pela intuição humana, Contudo, poderia limitar suas percepções àquelas experimentadas por humanos.
Para projetar robôs totalmente autônomos, pesquisadores podem, portanto, precisar se afastar de construções relacionadas a humanos, permitindo que os agentes robóticos desenvolvam sua própria maneira de perceber o mundo. Segundo a equipe de pesquisadores da Sorbonne Universités e do CNRS, um robô deve desenvolver gradualmente suas próprias noções perceptivas exclusivamente analisando suas experiências sensório-motoras e identificando padrões significativos.
"A hipótese geral é que ninguém dá noções perceptivas aos organismos biológicos, "Alexander Terekhov, um dos pesquisadores que realizou o estudo, disse TechXplore. "Em vez disso, esses conceitos são desenvolvidos ao longo do tempo, como ferramentas úteis que os ajudam a compreender os vastos dados sensório-motores aos quais estão constantemente expostos. Como consequência, a noção de espaço de um sapo provavelmente será diferente da de um morcego, que por sua vez será diferente da dos humanos. Então, ao construir um robô, que noção de espaço devemos dar a ele? Provavelmente nenhum desses. Se quisermos que os robôs sejam realmente inteligentes, não devemos construí-los usando noções abstratas, mas ao invés, fornecer-lhes algoritmos que lhes permitirão desenvolver essas noções por conta própria. "
Terekhov e seus colegas mostraram que a noção de espaço como independente do ambiente não pode ser deduzida apenas por informações exteroceptivas, pois esta informação varia muito dependendo do que é encontrado no ambiente. Essa noção poderia ser melhor definida examinando-se as funções que vinculam comandos motores a mudanças em estímulos externos ao agente.
"Uma percepção importante veio de um antigo estudo do famoso matemático francês Henri Poincare, que estava interessado em como a matemática em geral e a geometria em particular poderiam emergir da percepção humana, "Terekhov disse." Ele sugeriu que a coincidência na entrada sensorial pode desempenhar um papel crucial. "
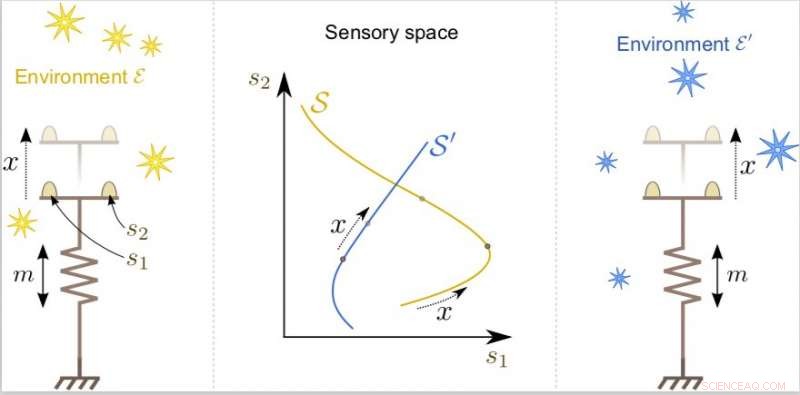
O agente pode mover seus sensores no espaço externo usando seu motor. Embora a configuração do agente externo x possa ser a mesma, sua experiência sensorial varia muito, dependendo da estrutura do ambiente. Crédito:Laflaquière et al.
As ideias introduzidas por Poincare podem ser melhor explicadas com um exemplo simples. Quando olhamos para um determinado objeto, os olhos capturam uma imagem particular, que mudará se o objeto se mover 10 cm para a esquerda. Contudo, se movermos 10 cm para a esquerda, a imagem que vemos permanecerá quase exatamente a mesma.
"Esta propriedade parece milagrosa se você pensar em quantos receptores o corpo humano tem, "Terekhov disse." É quase impossível ter a mesma entrada duas vezes na vida, no entanto, vivenciamos isso constantemente. Esses eventos de baixa probabilidade podem ser usados pelo cérebro para construir noções perceptivas gerais. "
Para aplicar essas idéias ao projeto de sistemas robóticos, os pesquisadores programaram um braço robótico virtual com uma câmera na ponta. O robô anotou as medidas provenientes das articulações do braço toda vez que recebeu a mesma entrada visual. "Ao associar todas essas medidas, o robô constrói uma abstração que é matematicamente equivalente à posição e orientação de sua câmera, mesmo que não tenha acesso explícito a essas informações, "Terekhov disse." A coisa mais importante é que, embora essa noção abstrata seja aprendida com base na entrada visual, acaba sendo independente dele, e, portanto, funciona para todos os ambientes; da mesma forma que nossa noção de espaço não depende da cena particular que vemos. "
Aplicando o mesmo princípio em outro estudo, os pesquisadores estimularam com sucesso um robô a compensar uma distorção óptica causada por uma lente colocada na frente de sua câmera. Tipicamente, isso seria alcançado por algoritmos de treinamento em pares de imagens distorcidas e não distorcidas.
"A parte complicada de nosso estudo foi que o robô teve que completar esta tarefa olhando apenas para as imagens distorcidas, assim como os humanos aprendem a compensar a distorção introduzida pelos óculos, "Terekhov disse." Acreditamos que os princípios introduzidos por Poincaré, que são a base de nossos algoritmos, podem ser mais gerais e são utilizados pelo cérebro em vários níveis. Atualmente, estamos explorando a possibilidade de usar esses princípios para construir redes neurais que não sofram de esquecimento catastrófico e possam gradualmente acumular conhecimento. "
© 2018 Tech Xplore