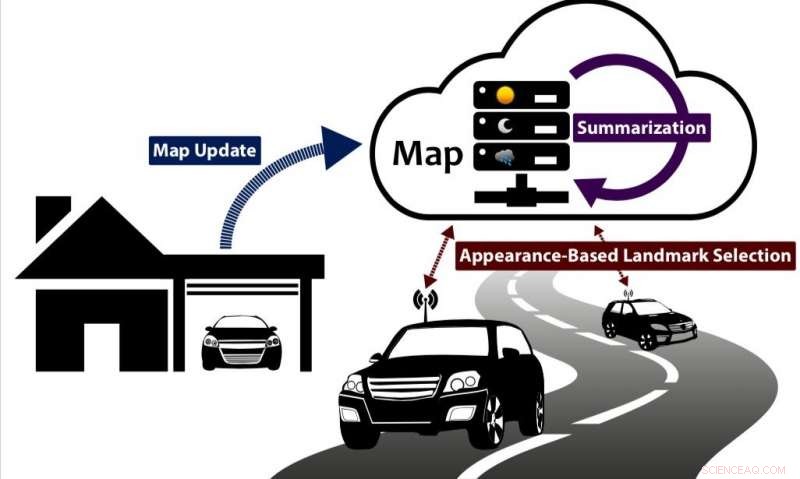
Uma visão geral esquemática de nosso sistema de mapeamento e localização visual "completo". Crédito:Bürki et al.
Pesquisadores do Laboratório de Sistemas Autônomos da ETH Zürich desenvolveram recentemente um processo de gerenciamento de mapas para sistemas de localização visual, projetado especificamente para operações em ambientes externos envolvendo vários veículos. Seu estudo, apresentado no Simpósio de Veículos Inteligentes (IV) deste ano e disponível no arXiv, aborda o principal desafio de incorporar grandes quantidades de dados de localização visual em um mapa visual para toda a vida, a fim de fornecer uma localização eficaz de forma consistente em todas as condições de aparência.
"A autolocalização é fundamental para qualquer tipo de robô móvel, incluindo veículos autônomos, "Mathias Bürki, um dos pesquisadores que realizou o estudo, disse Tech Xplore. "Embora a maioria dos veículos de pesquisa autônomos sejam equipados com sensores 3D LiDAR, ainda são caros, e sua adequação para futura produção em massa é, portanto, questionável. Por outro lado, sensores de câmera são muito baratos, e já fizeram o seu caminho para as frotas automotivas atuais (por exemplo, para sistemas de assistente de estacionamento). Portanto, temos investigado o potencial do uso de câmeras como um sensor principal para a localização precisa de veículos autônomos. "
Um dos principais desafios encontrados ao desenvolver sistemas de localização visual para ambientes externos é garantir que esses sistemas lidem bem com as mudanças de aparência. Estes incluem ambas as mudanças que ocorrem a curto prazo (por exemplo, iluminação, sombras, etc.) e de longo prazo (por exemplo, mudanças sazonais, folhagem, etc.).
Pesquisas anteriores descobriram que os mapas criados para localização visual poderiam teoricamente ser adaptados para funcionar em diferentes condições de aparência externa. Apesar disso, adaptar esses mapas pode ser muito caro, exigindo recursos substanciais gastos nos servidores que mantêm os mapas e nos próprios veículos autônomos. Embora haja uma série de soluções que podem ajudar a reduzir custos e resolver a complexidade deste problema, até aqui, estes só foram investigados isoladamente.
"O objetivo de nossa pesquisa recente era combinar diferentes componentes e abordagens que melhoram a escalabilidade, como resumo de mapa offline, e seleção online de pontos de referência com base na aparência, a fim de construir um sistema de localização e mapeamento totalmente escalonável e eficiente em termos de recursos, "Bürki explica." Também queríamos investigar em detalhes como esse sistema funciona no mundo real, condições de longo prazo, quanto tempo leva para os mapas visuais convergirem para um estado estável, quão bem os diferentes componentes que lidam com escalabilidade funcionam juntos, e se um interfere com o outro de forma indesejada. "
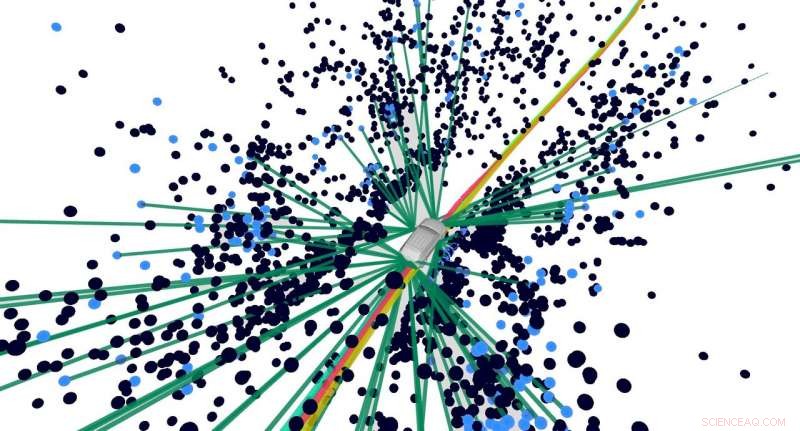
Uma captura de tela do sistema de localização visual dos pesquisadores. As esferas azul claro e escuro indicam a posição 3D dos pontos de referência visuais que são usados para localização. O azul claro indica aqueles que estão sendo selecionados pela seleção de pontos de referência com base na aparência, enquanto os escuros são aqueles que estão sendo descartados. As linhas esverdeadas indicam correspondências entre as imagens da câmera ao vivo no carro (de frente, deixou-, câmera traseira e direita), e os pontos de referência 3D no mapa. Por meio dessas partidas, a localização (posição, orientação) do carro é inferida. As linhas grossas coloridas ilustram as trajetórias por onde o carro estava dirigindo durante a gravação dos conjuntos de dados que foram usados para construir o mapa multi-sessão. Crédito:Bürki et al.
O processo de gerenciamento de mapas desenvolvido por Bürki e seus colegas funciona adicionando novos conjuntos de dados ao mapa ao longo do tempo, atualizando-o continuamente para melhor lidar com as novas condições de aparência. Cada vez que um novo conjunto de dados é adicionado ao mapa, uma etapa de resumo do mapa subsequente garante que seu tamanho não exceda um determinado limite.
"Se o novo conjunto de dados foi registrado sob condições de aparência que já estão bem cobertas pelo mapa, o conjunto de dados não é adicionado ao mapa, mas as estatísticas sobre as observações de pontos de referência foram aprimoradas, que em troca torna a seleção de pontos de referência baseada na aparência em surtidas futuras mais eficiente, "Bürki explica.
Os pesquisadores testaram o novo processo de gerenciamento de mapas no mundo real em condições externas desafiadoras. Os resultados de suas avaliações foram altamente promissores, sugerindo que seu mecanismo de gerenciamento de mapa leve pode ajudar a desenvolver sistemas de localização visual para veículos autônomos que funcionam bem em diferentes condições de aparência, ao mesmo tempo que tem um melhor desempenho na seleção de pontos de referência.
"Nossa descoberta mais significativa foi que é realmente possível e praticamente viável construir um sistema de localização visual e mapeamento que a) seja, e permanece eficiente, b) é, e permanece escalável, ec) oferece localização precisa em ambientes externos em longo prazo, "Bürki disse." Outra descoberta foi que a seleção online de pontos de referência baseada na aparência e o resumo do mapa offline funcionam bem juntos e se complementam ".
No futuro, a maioria dos veículos autônomos de alto desempenho provavelmente serão equipados com sensores 3D LiDAR, como estes parecem atualmente essenciais para garantir a segurança e garantir que o veículo perceba efetivamente os obstáculos em seu entorno, incluindo pedestres. Recentemente, o custo desses sensores diminuiu substancialmente, o que também poderia facilitar sua ampla adoção nos próximos anos.
"Agora vamos concentrar nossa pesquisa mais na questão de como os sensores LiDAR podem ser usados para apoiar a localização visual, "Bürki disse." Especialmente em más condições de iluminação, câmeras inevitavelmente atingem seus limites, enquanto LiDARs também são adequados para condições de escuridão. "
© 2018 Tech Xplore