Usar uma rede neural de aprendizado profundo para permitir que um carro aprenda a dirigir a si mesmo em apenas 20 minutos
 p Crédito:Wayve
p Crédito:Wayve
p Uma equipe de pesquisadores da startup Wayve do Reino Unido desenvolveu uma maneira de aplicar a rede de aprendizagem profunda à direção autônoma. Em uma postagem recente no blog (junto com o vídeo de demonstração do YouTube), os representantes descreveram como sua tecnologia funciona, e oferecer uma demonstração usando um carro real em uma estrada real. p Como observa a equipe da Wayve, a maioria dos carros autônomos usa uma série de câmeras e sensores, junto com ferramentas de mapeamento e muita programação de computador. Mas tal abordagem, eles discutem, esquece o que parece ser uma espécie de teto. Carros autônomos programados por grandes empresas como o Google chegaram a um ponto em que são bons, mas não é bom o suficiente para uso comum. Esse, eles afirmam, é porque esses carros ainda não são inteligentes o suficiente para lidar com as inúmeras condições presentes em uma estrada comum. O que é preciso, eles sugerem, é um computador mais inteligente, não mais sensores ou programação.
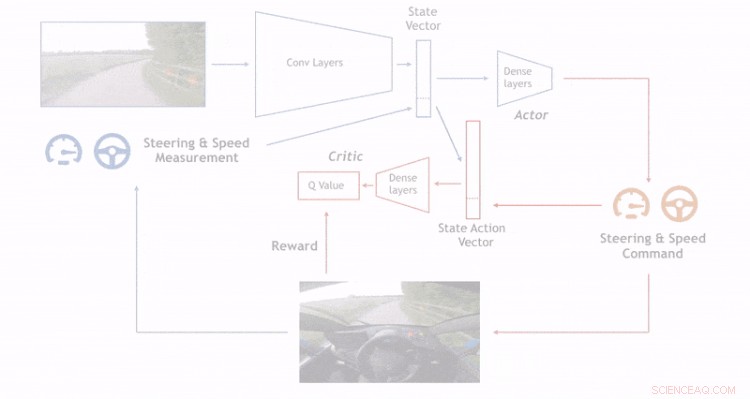
p A equipe da Wayve acredita que uma abordagem mais inteligente é usar algoritmos de aprendizado por reforço, como aqueles usados em projetos como DeepMind - deixe o computador aprender a fazer algo da mesma maneira que as pessoas, praticando. Algoritmos de aprendizado por reforço são o que está no cerne das redes de aprendizado profundo - eles aprendem fazendo, uma e outra vez, melhorando à medida que avançam. No caso de controle de veículo autônomo, isso significaria dirigir um carro até acertar.
p Para demonstrar o quão bem essa abordagem pode funcionar, uma equipe da Wayve equipou um Renault Twizy com uma única câmera e gás, freio e engrenagem de controle de direção e, em seguida, conectou-os a um processador gráfico e um computador executando algoritmos de aprendizagem de reforço que a empresa desenvolveu. O computador foi "informado" de que o resultado ideal seria o carro avançando em uma estrada sem sair da estrada. Quanto mais tempo poderia fazer isso, o melhor. Eles então adicionaram um motorista humano e colocaram o carro em uma estrada secundária. O motorista humano apontaria o carro na direção certa e então permitiria que o computador assumisse o controle. Se o carro quase saiu da estrada, o humano iria pará-lo, alinhe o carro e dê uma nova chance ao computador. Desta forma, o computador foi capaz de aprender como evitar que o carro saia da estrada em cerca de 20 minutos. Depois disso, foi capaz de continuar indefinidamente.
p © 2018 Tech Xplore