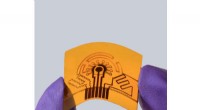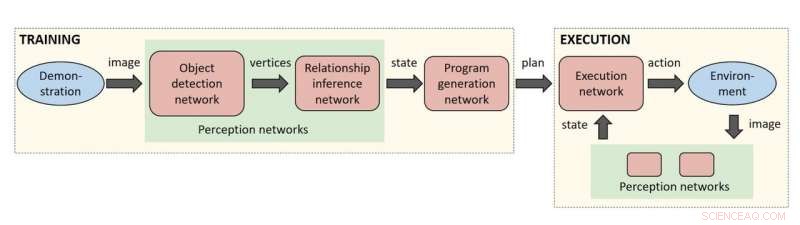
Uma descrição de como o método funciona:uma câmera adquire um feed de vídeo ao vivo de uma cena, e as posições e relações dos objetos na cena são inferidas em tempo real por um par de redes neurais. As percepções resultantes são alimentadas para outra rede que gera um plano para explicar como recriar essas percepções. Finalmente, uma rede de execução lê o plano e gera ações para o robô, levando em consideração o estado atual do mundo para garantir robustez a perturbações externas. Crédito:NVIDIA
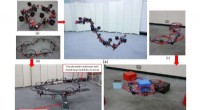
Os pesquisadores da NVIDIA começaram a ensinar um robô a completar uma tarefa - aqui está o kicker - simplesmente observando as ações de um humano. As redes foram treinadas conforme descrito em um vídeo. O sistema foi testado no mundo real em um problema de pick-and-place de empilhamento de cubos coloridos, e eles usaram um robô Baxter.
Uma equipe de seis autores discutiu este trabalho, "Redes neurais sinteticamente treinadas para a aprendizagem de planos legíveis por humanos a partir de demonstrações no mundo real." Seu sucesso envolveu um robô que foi capaz de aprender uma tarefa a partir de uma única demonstração no mundo real.
Por que é importante:os planejadores exploram questões sobre como os humanos trabalharão ao lado dos robôs - com que segurança e eficiência isso pode ser feito? Os autores colocam isso claramente. "Para que os robôs executem tarefas úteis em configurações do mundo real, deve ser fácil comunicar a tarefa ao robô; isso inclui o resultado final desejado e quaisquer dicas sobre os melhores meios para atingir esse resultado. "
Frederic Lardinois em TechCrunch ponderou:"Os robôs industriais costumam repetir uma tarefa bem definida indefinidamente. Normalmente, isso significa realizar essas tarefas a uma distância segura dos humanos frágeis que as programaram. Mais e mais, Contudo, pesquisadores agora estão pensando em como robôs e humanos podem trabalhar próximos aos humanos e até mesmo aprender com eles. "
Lardinois disse que Dieter Fox, o diretor sênior de pesquisa de robótica da NVIDIA, disse a ele que a equipe queria habilitar esta próxima geração de robôs que possam trabalhar com segurança em estreita proximidade com os humanos. Os robôs precisarão aprender como podem ajudar as pessoas, seja em ambientes industriais ou nas casas das pessoas.
A equipe mostrou um sistema para inferir e executar um programa legível por humanos a partir de uma demonstração do mundo real.
O site NVIDIA Developer disse que este é o primeiro sistema de aprendizado profundo desse tipo que pode ensinar um robô a completar uma tarefa apenas observando as ações de um ser humano. “Com demonstrações, um usuário pode comunicar uma tarefa ao robô e fornecer pistas sobre a melhor forma de executá-la. "
Seu sistema envolvia uma série de redes neurais. Como funcionavam:os pesquisadores treinaram uma sequência de redes neurais para realizar funções associadas à percepção, geração e execução de programas.
Sua técnica:uma câmera adquiriu um feed de vídeo ao vivo de uma cena onde as posições e relações dos objetos foram inferidas em tempo real por um par de redes neurais. Estas foram enviadas para outra rede que gerou um plano para explicar como recriar essas percepções. Uma rede de execução leu o plano e gerou ações para o robô.
O que diferencia sua exploração das pesquisas anteriores? A diferença está no treinamento de redes neurais. As abordagens atuais exigem grandes quantidades de dados de treinamento rotulados - um "sério gargalo nesses sistemas, "disse o site da NVIDIA.
Em contraste, "Com a geração de dados sintéticos, uma quantidade quase infinita de dados de treinamento rotulados pode ser produzida com muito pouco esforço. "
Lardinois em TechCrunch classificou sua pesquisa como "um passo importante nesta jornada geral que nos permite ensinar novas tarefas a um robô".
Dado o forte aspecto visual deste processo de treinamento, ele escreveu, A experiência da Nvidia em hardware gráfico certamente ajuda. TechSpot observou como "Executar todas essas redes neurais requer alguns recursos de computação sérios."
Os pesquisadores usaram GPUs NVIDIA TITAN X.
Jonathan Tremblay, Thang To, Artem Molchanov, Stephen Tyree, Jan Kautz, Stan Birchfield é a equipe por trás do jornal.
© 2018 Tech Xplore