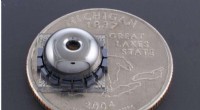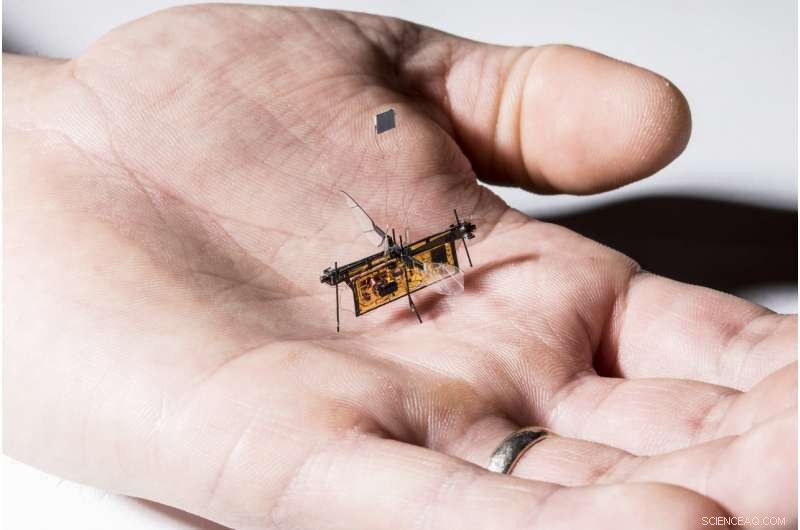
RoboFly, o primeiro robô voador sem fio do tamanho de um inseto, é ligeiramente mais pesado que um palito. Crédito:Mark Stone / University of Washington
Robôs voadores do tamanho de um inseto podem ajudar em tarefas demoradas, como o levantamento do crescimento das plantações em grandes fazendas ou farejar vazamentos de gás. Esses robôs voam batendo asas minúsculas porque são pequenos demais para usar hélices, como aqueles vistos em seus primos drones maiores. O tamanho pequeno é vantajoso:esses robôs são baratos de fazer e podem facilmente deslizar em lugares apertados que são inacessíveis para drones grandes.
Mas os atuais robôs-insetos voadores ainda estão presos ao solo. Os componentes eletrônicos de que precisam para alimentar e controlar suas asas são pesados demais para serem carregados por esses robôs em miniatura.
Agora, engenheiros da Universidade de Washington cortaram pela primeira vez o cordão e adicionaram um cérebro, permitindo que seu RoboFly fizesse seus primeiros flaps independentes. Pode ser uma pequena aba para um robô, mas é um salto gigante para o tipo de robô. A equipe apresentará suas descobertas em 23 de maio na Conferência Internacional sobre Robótica e Automação em Brisbane, Austrália.
O RoboFly é ligeiramente mais pesado do que um palito de dente e é alimentado por um feixe de laser. Ele usa um minúsculo circuito interno que converte a energia do laser em eletricidade suficiente para operar suas asas.
"Até agora, o conceito de robôs voadores sem fio do tamanho de insetos era ficção científica. Será que algum dia conseguiríamos fazê-los funcionar sem a necessidade de um fio? ", Disse o co-autor Sawyer Fuller, um professor assistente no Departamento de Engenharia Mecânica da UW. "Nosso novo RoboFly sem fio mostra que eles estão muito mais próximos da vida real."
O desafio da engenharia é o bater de asas. O bater de asas é um processo que consome muita energia, e tanto a fonte de energia quanto o controlador que direciona as asas são muito grandes e volumosos para andar a bordo de um pequeno robô. Então, o inseto-robô anterior de Fuller, o RoboBee, tinha uma coleira - recebia energia e controle por meio de fios do solo.
Mas um robô voador deve ser capaz de operar por conta própria. Fuller e sua equipe decidiram usar um feixe de laser invisível estreito para alimentar seu robô. Eles apontaram o feixe de laser para uma célula fotovoltaica, que é anexado acima do RoboFly e converte a luz laser em eletricidade.
"Foi a maneira mais eficiente de transmitir rapidamente muita potência para o RoboFly sem adicionar muito peso, "disse o co-autor Shyam Gollakota, professor associado da Escola Paul G. Allen de Ciência da Computação e Engenharia da UW.
Ainda, o laser sozinho não fornece voltagem suficiente para mover as asas. É por isso que a equipe projetou um circuito que aumentou os sete volts que saem da célula fotovoltaica para os 240 volts necessários para o vôo.

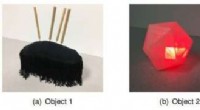
Para alimentar o RoboFly, os engenheiros apontaram um feixe de laser invisível (mostrado aqui em laser vermelho) para uma célula fotovoltaica, que é anexado acima do robô e converte a luz do laser em eletricidade. Crédito:Mark Stone / University of Washington
Para dar ao RoboFly o controle sobre suas próprias asas, os engenheiros forneceram um cérebro:eles adicionaram um microcontrolador ao mesmo circuito.
"O microcontrolador atua como o cérebro de uma mosca real, dizendo aos músculos das asas quando disparar, "disse o co-autor Vikram Iyer, um aluno de doutorado no Departamento de Engenharia Elétrica da UW. "No RoboFly, diz às asas coisas como 'bata forte agora' ou 'não bata'. "
Especificamente, o controlador envia voltagem em ondas para imitar o bater das asas de um inseto real.
"Ele usa pulsos para moldar a onda, "disse Johannes James, o autor principal e um estudante de doutorado em engenharia mecânica. "Para fazer as asas baterem para frente rapidamente, ele envia uma série de pulsos em rápida sucessão e, em seguida, diminui a pulsação conforme você se aproxima do topo da onda. E então ele faz isso ao contrário para fazer as asas baterem suavemente na outra direção. "

Para tornar o RoboFly sem fio, os engenheiros projetaram um circuito flexível (amarelo) com um conversor de reforço (bobina de cobre e caixas pretas à esquerda) que aumenta os sete volts vindos da célula fotovoltaica para os 240 volts necessários para o voo. Este circuito também possui um cérebro microcontrolado (caixa quadrada preta no canto superior direito) que permite ao RoboFly controlar suas asas. Crédito:Mark Stone / University of Washington
Por enquanto, RoboFly só pode decolar e pousar. Uma vez que sua célula fotovoltaica está fora da linha de visão direta do laser, o robô fica sem energia e pousa. Mas a equipe espera ser capaz de guiar o laser em breve para que o RoboFly possa pairar e voar por aí.
Embora o RoboFly atualmente seja alimentado por um feixe de laser, versões futuras podem usar baterias minúsculas ou colher energia de sinais de radiofrequência, Gollakota disse. Dessa maneira, sua fonte de alimentação pode ser modificada para tarefas específicas.
Futuros RoboFlies também podem contar com cérebros mais avançados e sistemas de sensores que ajudam os robôs a navegar e completar tarefas por conta própria, Fuller disse.
"Eu realmente gostaria de fazer um que encontrasse vazamentos de metano, "ele disse." Você poderia comprar uma mala cheia deles, abra-o, e eles voariam ao redor de seu prédio em busca de plumas de gás saindo de canos com vazamento. Se esses robôs puderem facilitar a localização de vazamentos, eles serão muito mais prováveis de serem corrigidos, que irá reduzir as emissões de gases de efeito estufa. Isso é inspirado por moscas reais, que são realmente bons em voar à procura de coisas fedorentas. Portanto, achamos que este é um bom aplicativo para o nosso RoboFly. "