Novo modelo de computador realista ajudará robôs a coletar poeira lunar
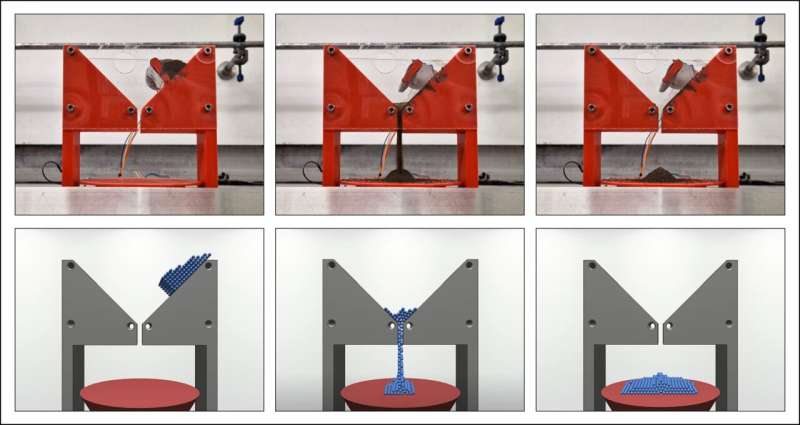
Fluxo de funil pequeno — Os mesmos experimentos foram realizados em simulação e realidade para ver se o regolito virtual se comportava de forma realista. Este teste analisou como pequenas amostras (16 g) de material fluíam através de funis estreitos. Crédito:Joe Louca Um novo modelo de computador imita tão bem a poeira lunar que pode levar a teleoperações de robôs lunares mais suaves e seguras. A ferramenta, desenvolvida por pesquisadores da Universidade de Bristol e baseada no Laboratório de Robótica de Bristol, poderia ser usada para treinar astronautas antes das missões lunares.
A pesquisa deles foi publicada na revista Frontiers in Space Technologies .
Trabalhando com o seu parceiro industrial, Thales Alenia Space, no Reino Unido, que tem interesse específico na criação de sistemas robóticos funcionais para aplicações espaciais, a equipa investigou uma versão virtual do regolito, outro nome para poeira lunar.
O regolito lunar é de particular interesse para as próximas missões de exploração lunar planejadas para a próxima década. A partir dele, os cientistas podem potencialmente extrair recursos valiosos, como oxigênio, combustível de foguete ou materiais de construção, para apoiar uma presença de longo prazo na Lua.
Para coletar regolito, robôs operados remotamente surgem como uma escolha prática devido aos seus riscos e custos mais baixos em comparação com voos espaciais tripulados. No entanto, operar robôs nessas grandes distâncias introduz grandes atrasos no sistema, o que os torna mais difíceis de controlar.
Agora que a equipe sabe que esta simulação se comporta de forma semelhante à realidade, eles podem usá-la para espelhar a operação de um robô na Lua. Esta abordagem permite que os operadores controlem o robô sem atrasos, proporcionando uma experiência mais suave e eficiente. Vídeo de demonstração do Regolith Sim — O modelo pode ser ajustado para representar diferentes materiais:rolamentos de esferas, areia seca e simulador de regolito coeso, sob A gravidade da Terra ou da Lua. A viscosidade do regolito virtual faz com que ele flua mais lentamente pelos funis. Crédito:Joe Louca O autor principal Joe Louca, baseado na Escola de Engenharia, Matemática e Tecnologia de Bristol, explicou:"Pense nisso como um videogame realista ambientado na lua - queremos ter certeza de que a versão virtual da poeira lunar se comporta exatamente como a coisa real, para que se o usarmos para controlar um robô na Lua, então ele se comportará como esperamos. Este modelo é preciso, escalável e leve, portanto pode ser usado para apoiar as próximas missões de exploração lunar."
Este estudo seguiu-se a trabalhos anteriores da equipe, que descobriu que operadores de robôs especializados desejam treinar em seus sistemas com risco e realismo gradualmente crescentes. Isso significa começar com uma simulação e passar a usar maquetes físicas, antes de passar a usar o sistema real. Um modelo de simulação preciso é crucial para treinar e desenvolver a confiança do operador no sistema.
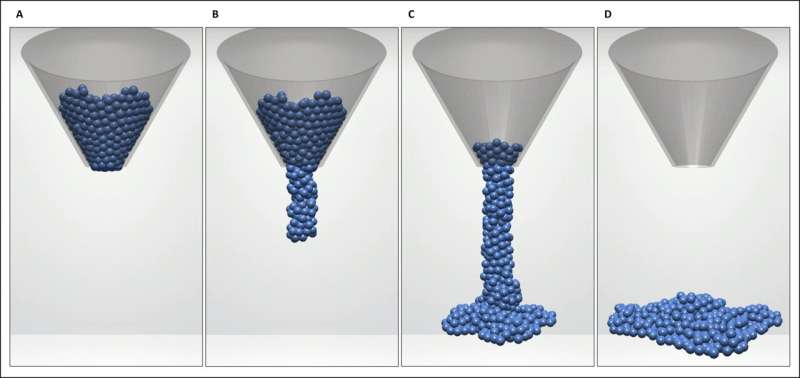
Embora alguns modelos especialmente precisos de poeira lunar tenham sido desenvolvidos anteriormente, eles são tão detalhados que exigem muito tempo computacional, o que os torna muito lentos para controlar um robô sem problemas. Pesquisadores do DLR (Centro Aeroespacial Alemão) enfrentaram esse desafio desenvolvendo um modelo virtual de regolito que considera sua densidade, viscosidade e fricção, bem como a gravidade reduzida da lua. Seu modelo é de interesse para a indústria espacial, pois tem poucos recursos computacionais e, portanto, pode ser executado em tempo real. No entanto, funciona melhor com pequenas quantidades de poeira lunar. Configuração de funil grande — A simulação foi ampliada para testar quantidades maiores de regolito. Este exemplo derramou 0,5 kg de regolito através de funis mais largos, para comparar com equivalentes físicos. Crédito:Joe Louca Os objetivos da equipe de Bristol eram, em primeiro lugar, estender o modelo para que ele pudesse lidar com mais regolito, ao mesmo tempo que permanecesse leve o suficiente para funcionar em tempo real, e depois verificá-lo experimentalmente.
Louca acrescentou:"Nosso foco principal ao longo deste projeto foi melhorar a experiência do usuário para os operadores desses sistemas - como poderíamos facilitar seu trabalho? Começamos com o modelo de regolito virtual original desenvolvido pela DLR e o modificamos para torná-lo mais escalonável . Em seguida, conduzimos uma série de experimentos - metade em um ambiente simulado, metade no mundo real - para medir se a poeira lunar virtual se comportava da mesma forma que sua contraparte no mundo real."
Como este modelo de regolito é promissor por ser preciso, escalável e leve o suficiente para ser usado em tempo real, a equipe investigará a seguir se ele pode ser usado ao operar robôs para coletar regolito.
Eles também planejam investigar se um sistema semelhante poderia ser desenvolvido para simular o solo marciano, o que poderia ser benéfico para futuras missões de exploração, ou para treinar cientistas para lidar com material da tão aguardada missão de retorno de amostras de Marte.
Mais informações: Joe Louca et al, Verificação de um simulador de regolito lunar virtual, Frontiers in Space Technologies (2024). DOI:10.3389/frspt.2024.1303964 Fornecido pela Universidade de Bristol