O resultado desta pesquisa mostra que os robôs podem ser intuitivamente ensinados a serem flexíveis por humanos, pois não foi realizado por meio de cálculo numérico ou programação dos movimentos do robô. Crédito:Instituto Coreano de Ciência e Tecnologia (KIST)
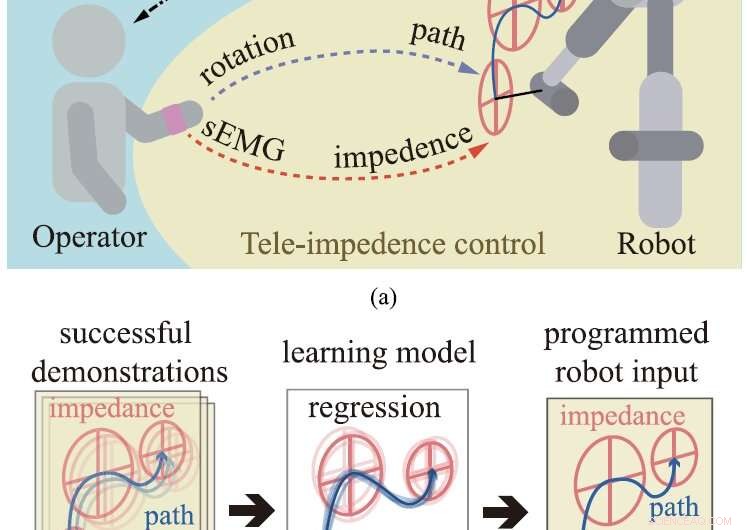
A equipe do Dr. Kee-hoon Kim no Centro de Robótica Inteligente e Interativa do Instituto Coreano de Ciência e Tecnologia (KIST) desenvolveu uma maneira de ensinar "robôs controlados por impedância" por meio de demonstrações humanas usando eletromiogramas de superfície (sEMG) de músculos, e conseguiu ensinar um robô a prender a bola ao chão como um jogador de futebol. Um eletromiograma de superfície é um sinal elétrico produzido durante a ativação muscular que pode ser captado na superfície da pele.
Robôs controlados por impedância desenvolvidos recentemente abriram uma nova era de robótica baseada na elasticidade natural dos músculos e articulações humanas, que faltam aos robôs convencionais rígidos. Espera-se que os robôs com juntas flexíveis sejam capazes de funcionar, pule obstáculos e pratique esportes como humanos. Contudo, a tecnologia necessária para ensinar esses robôs a se mover dessa maneira não estava disponível até recentemente.
A equipe de pesquisa KIST se tornou a primeira no mundo a desenvolver uma maneira de ensinar novos movimentos para robôs controlados por impedância usando sinais de músculos humanos. Com esta tecnologia, que detecta não apenas os movimentos humanos, mas também as contrações musculares por meio de sEMG, agora é possível que os robôs imitem movimentos baseados em demonstrações humanas.
A equipe do Dr. Kee-hoon Kim conseguiu usar o sEMG para ensinar um robô a capturar uma bola que cai rapidamente antes que ela entre em contato com uma superfície sólida ou salte muito longe para alcançar - semelhante às habilidades empregadas por jogadores de futebol.
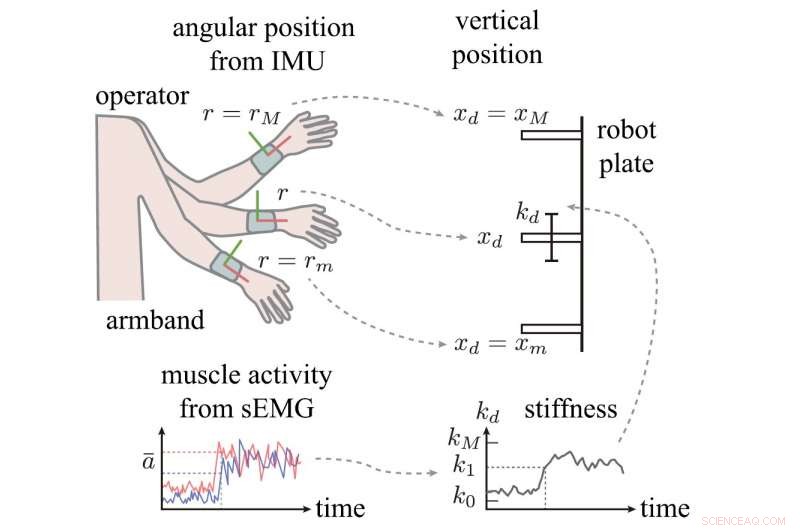
Sensores SEMG foram anexados ao braço de um homem, permitindo que ele controle simultaneamente a localização e flexibilidade dos movimentos rápidos para cima e para baixo do robô. Crédito:Instituto Coreano de Ciência e Tecnologia (KIST)
Sensores SEMG foram anexados ao braço de um homem, permitindo que ele controle simultaneamente a localização e flexibilidade dos movimentos rápidos para cima e para baixo do robô. O homem então "ensinou" ao robô como capturar uma bola que cai rapidamente, fazendo uma demonstração pessoal. Depois de aprender o movimento, o robô foi capaz de prender habilmente uma bola lançada sem qualquer ajuda externa.
O resultado desta pesquisa, o que mostra que os robôs podem ser intuitivamente ensinados a serem flexíveis por humanos, atraiu muita atenção, pois não foi realizado por meio de cálculo numérico ou programação dos movimentos do robô. Espera-se que este estudo ajude a avançar no estudo das interações entre humanos e robôs, trazendo-nos um passo mais perto de um mundo no qual os robôs são parte integrante de nossas vidas diárias.
Kim disse, "O resultado desta pesquisa, que se concentra no ensino de habilidades humanas para robôs, é uma conquista importante no estudo das interações entre humanos e robôs. "
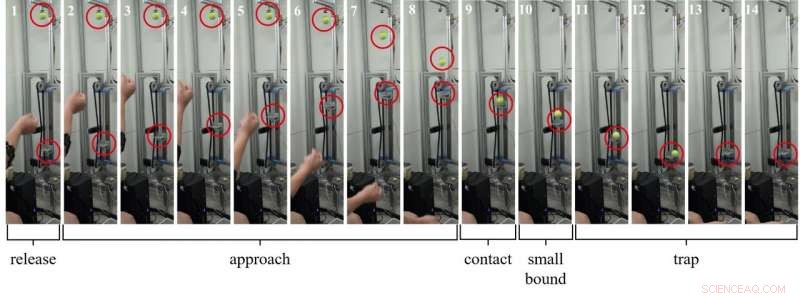
Demonstração de um robô para capturar a bola sem codificação. Crédito:Instituto Coreano de Ciência e Tecnologia (KIST)














