Uma foto do módulo de câmera / radar com sua caixa. Crédito:Fraunhofer-Gesellschaft
Quando uma criança corre para a estrada, o motorista humano médio leva 1,6 segundos para pisar no pedal do freio. O tempo de reação é reduzido para 0,5 segundos para veículos automatizados equipados com sensores radar / lidar e um sistema de câmera. Mas a uma velocidade de 50 km / h, isso ainda significa que o veículo continuará por mais sete metros antes que os freios sejam acionados e pare.
Em resposta, o Instituto Fraunhofer de Confiabilidade e Microintegração IZM se associou a uma série de parceiros de ambos os setores (InnoSenT, Silicon Radar, Jabil Optics Germany, AVL, John Deere) e institutos de pesquisa (Fraunhofer Institute for Open Communication Systems FOKUS, DCAITI) para desenvolver um módulo de radar de câmera significativamente mais rápido na captura de mudanças nas condições de tráfego. A nova unidade, não maior que um smartphone, terá um tempo de reação de menos de 10 milissegundos, o que, de acordo com um estudo realizado pela Universidade de Michigan (ver fonte), o torna 50 vezes mais rápido do que os sistemas de sensores atuais e 160 vezes mais rápido do que o motorista humano médio. Com o novo sistema, o veículo de nosso exemplo anterior viajaria por apenas 15 cm antes de o sistema intervir e iniciar a manobra de frenagem - potencialmente eliminando muitos acidentes rodoviários no centro da cidade.
O processamento de sinal integrado reduz o tempo de reação
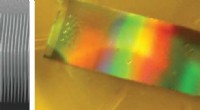
A verdadeira inovação no novo sistema é sua capacidade de processamento de sinal integrado. Isso permite que todo o processamento ocorra diretamente no módulo, com o sistema filtrando seletivamente os dados do sistema de radar e da câmera estéreo, de modo que o processamento possa ocorrer imediatamente ou ser atrasado intencionalmente até um estágio de processamento subsequente. Informações não relevantes são reconhecidas, mas não encaminhado. A fusão do sensor é aplicada para combinar os dados da câmera e do radar. As redes neurais então avaliam os dados e determinam as implicações de tráfego do mundo real com base em técnicas de aprendizado de máquina.
Como resultado, o sistema não precisa enviar informações de status para o veículo, mas apenas instruções de reação. Isso libera a linha de ônibus do veículo para lidar com sinais importantes, por exemplo, detectar uma criança correndo repentinamente para a estrada. "O processamento de sinal integrado reduz drasticamente os tempos de reação, "diz Christian Tschoban, chefe do grupo no departamento de RF &Smart Sensor Systems. Junto com seus colegas, Tschoban está atualmente trabalhando no projeto KameRad (veja a caixa de informações).
O demonstrador em funcionamento que ele e sua equipe desenvolveram parece uma caixa cinza com olhos à direita e à esquerda - as câmeras estéreo. O projeto vai até 2020. Até então, os parceiros do projeto AVL List GmbH e DCAITI estarão ocupados testando o protótipo inicial, incluindo testes rodoviários em Berlim. Tschoban espera que em alguns anos sua "caixa cinza" seja instalada como padrão em todos os veículos, trazendo mais segurança para o tráfego automatizado no centro da cidade.