 p Conjunto codificado por forma de microactuadores magnéticos na forma de um microveículo. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Conjunto codificado por forma de microactuadores magnéticos na forma de um microveículo. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
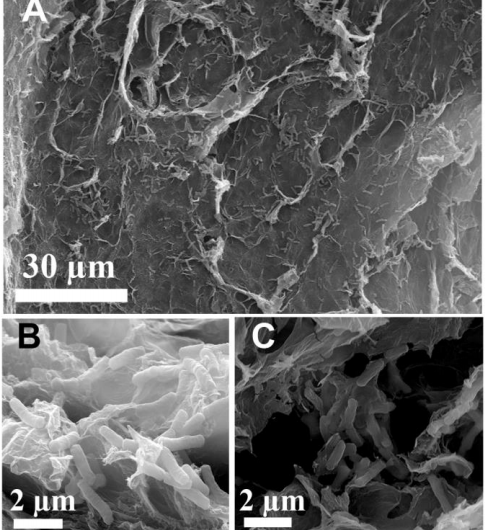
p O conjunto coloidal autopropelido e dirigido por campo pode ser usado para construir micro-máquinas para realizar movimentos e funções complexas, embora sua integração como componentes heterogêneos com estruturas especificadas, a dinâmica e as funções dentro das micro-máquinas são desafiadoras. Em um estudo recente sobre
Materiais da Natureza , Yunus Alapan e colegas de trabalho nos departamentos de inteligência física e materiais complexos na Alemanha e na Suíça descreveram a automontagem dinâmica de micromáquinas móveis com as configurações desejadas usando interações físicas pré-programadas entre unidades estruturais e motoras. p Eles conduziram a montagem usando interações dieletroforéticas (DEP) codificadas em uma forma tridimensional (3-D) de peças individuais. Eles seguiram o protocolo montando as novas micromáquinas com peças de motor magnéticas e autopropelidas para locomoção reconfigurável e graus adicionais de liberdade até então não realizados com microrrobôs monolíticos convencionais. A estratégia de montagem seletiva no local era versátil e poderia ser demonstrada em diferentes, reconfigurável, Micromáquinas móveis hierárquicas e tridimensionais (3-D). Os cientistas antecipam os princípios de design apresentados no trabalho para avançar e inspirar o desenvolvimento de micro-máquinas mais sofisticadas integradas em sistemas hierárquicos multiescala.
p Micromáquinas móveis oferecem potencial significativo para sondar e manipular o mundo microscópico e criar ordens / montagens funcionais em escala micro e meso. Uma micromáquina pode ser composta de várias partes, materiais ou químicos para atender a várias funções, incluindo atuação, de detecção, transporte e entrega. Os modos funcionais e o desempenho de uma micro-máquina podem ser ditados pela organização e interação coletiva de seus constituintes.
p Por exemplo, partículas magnéticas interagindo sob campos magnéticos rotativos podem se reunir em correntes ou rodas capazes de se mover perto de superfícies sólidas. De forma similar, os cientistas desenvolveram micro-nadadores ativados por luz dentro de cristais vivos e permitiram a auto-rotação regulando o consumo de produtos químicos. Para projetar maior complexidade, bioengenheiros e cientistas de materiais devem permitir interações físicas programáveis em partes individuais para ações específicas de forma e material sob influências externas. Os exemplos incluem o desenvolvimento de microestruturas compostas montadas como coloides usando moldes elétricos e magnéticos virtuais.
p Embora novas abordagens tenham se mostrado promissoras para construir conjuntos estruturais programáveis, estes ainda precisam ser traduzidos em conjuntos de micromáquinas móveis. No presente trabalho, Alapan et al. introduziu um processo de montagem direcionado para construir micromáquinas compostas móveis usando forças dieletroforéticas (DEP) para codificar distribuição precisamente controlada de gradientes de campo elétrico ao redor de um corpo modulando sua geometria 3-D.
p Os resultados mostraram microactuadores seletivos e direcionais com uma estratégia de montagem codificada por forma versátil. Eles mostraram a possibilidade de um reforço aprimorado entre os atuadores e o corpo, ajustando as forças DEP para fornecer controle sobre a rotação. Alapan et al. implementou uma nova estratégia de design de montagem direcionada para controlar a dinâmica operacional entre componentes funcionais usando forças DEP codificadas por forma. O trabalho experimental proporcionará um rico espaço de design para desenvolver micro-máquinas funcionais e microbots móveis para realizar tarefas complexas.
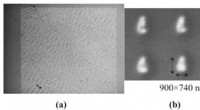
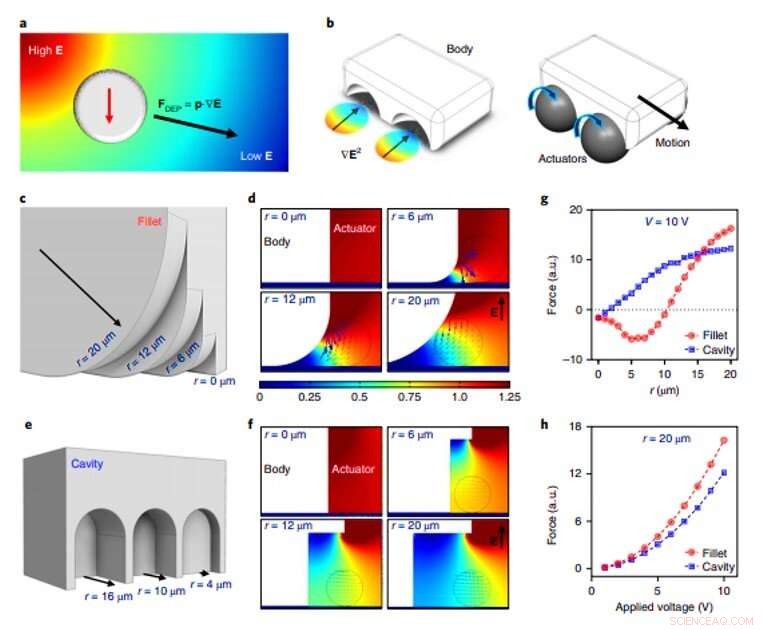 p Codificação espacial de locais de atração DEP modulando a geometria 3D. (uma), Uma partícula polarizada negativamente, com uma permissividade relativa inferior do que o meio (εp <εm) experimenta uma força DEP em direção às magnitudes de campo mais baixas sob um campo elétrico não uniforme. (b), As forças DEP podem ser exploradas para a montagem codificada de componentes funcionais controlando gradientes de campo elétrico locais gerados em torno de um corpo por meio de sua geometria. (c – f), Perfis de superfície 3D diferentes (filete ou cavidade) de um corpo sólido alteram a intensidade do campo elétrico ao redor do corpo (c, e), criando gradientes locais em torno dos perfis de superfície, dependendo da dimensão do recurso, r (d, f). As setas representam gradientes de campo elétrico dentro da região circular que representa um microactuador (10 µm de diâmetro), que está localizado no ponto de força máxima. Força do campo elétrico normalizado da barra de cores (E / E0) 2. (g, h), Atuadores menores polarizados negativamente experimentam uma força DEP em direção a (F> 0) ou para longe (F <0) do recuo devido ao gradiente de campo em torno do perfil da superfície. A magnitude e a direção da força DEP dependem do tipo de perfil e do tamanho do recurso (g), bem como a tensão aplicada (h). Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Codificação espacial de locais de atração DEP modulando a geometria 3D. (uma), Uma partícula polarizada negativamente, com uma permissividade relativa inferior do que o meio (εp <εm) experimenta uma força DEP em direção às magnitudes de campo mais baixas sob um campo elétrico não uniforme. (b), As forças DEP podem ser exploradas para a montagem codificada de componentes funcionais controlando gradientes de campo elétrico locais gerados em torno de um corpo por meio de sua geometria. (c – f), Perfis de superfície 3D diferentes (filete ou cavidade) de um corpo sólido alteram a intensidade do campo elétrico ao redor do corpo (c, e), criando gradientes locais em torno dos perfis de superfície, dependendo da dimensão do recurso, r (d, f). As setas representam gradientes de campo elétrico dentro da região circular que representa um microactuador (10 µm de diâmetro), que está localizado no ponto de força máxima. Força do campo elétrico normalizado da barra de cores (E / E0) 2. (g, h), Atuadores menores polarizados negativamente experimentam uma força DEP em direção a (F> 0) ou para longe (F <0) do recuo devido ao gradiente de campo em torno do perfil da superfície. A magnitude e a direção da força DEP dependem do tipo de perfil e do tamanho do recurso (g), bem como a tensão aplicada (h). Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Alapan et al. primeiro programou os gradientes de campo em torno de uma construção para conduzir a montagem de peças da micro-máquina em locais desejados usando interações DEP. O princípio de funcionamento do dispositivo sob campos elétricos dependia da regulação dependente da forma dos campos elétricos em torno dos corpos polarizáveis da micro-máquina montada. Para programar os gradientes locais, eles investigaram como campos não elétricos podem ser modulados em torno de diferentes geometrias.
p Os cientistas, então, demonstraram a automontagem controlada de micro-máquinas móveis influenciadas por campos elétricos, onde primeiro se concentraram na montagem de um microveículo simples. O microveículo experimental continha um grande corpo esférico dielétrico não magnético e vários microatuadores magnéticos menores organizados em torno do corpo maior. Quando eles aplicaram um campo elétrico no eixo Z, o corpo não magnético gerou gradientes de campo elétrico local para atrair microactuadores menores em torno de seus pólos. Os atuadores magnéticos recém-montados serviram como rodas de propulsão e Alapan et al. poderia dirigir o microveículo mudando a direção do campo magnético aplicando um campo magnético girando verticalmente.
p Enquanto eles aumentaram a velocidade do microveículo, aumentando o número de microactuadores, quando a tensão no sistema aumentou - a velocidade do microveículo diminuiu. Os cientistas presumiram que isso se devia ao aumento do acoplamento mecânico entre as micropartículas e o substrato durante as interações DEP. Os pesquisadores usaram o método para capturar distribuídas aleatoriamente, partículas não magnéticas com microatuadores magnéticos pela aplicação de um campo elétrico, em seguida, transladou-os para uma nova posição usando um campo magnético giratório para liberação ao desligar o campo elétrico.
 p Montagem e translação de um microveículo composto com atuadores magnéticos. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Montagem e translação de um microveículo composto com atuadores magnéticos. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Para controlar os graus de liberdade de rotação do microveículo, Alapan et al. poderia regular a força das forças atraentes DEP entre o corpo passivo e os micro atuadores para ajustar seu acoplamento mecânico. Por exemplo, em baixas tensões, as pequenas forças DEP atraentes levaram a um fenômeno de acoplamento baseado em lubrificação frouxa, permitindo que os microatuadores se movessem livremente ao redor do pólo. As articulações rotatórias desenvolvidas no estudo podem se tornar cruciais para sistemas biológicos específicos durante o desenvolvimento de moléculas sintéticas, nanomáquinas e micromáquinas para aplicação na transmissão mecânica de energia.
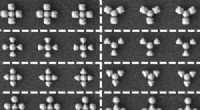
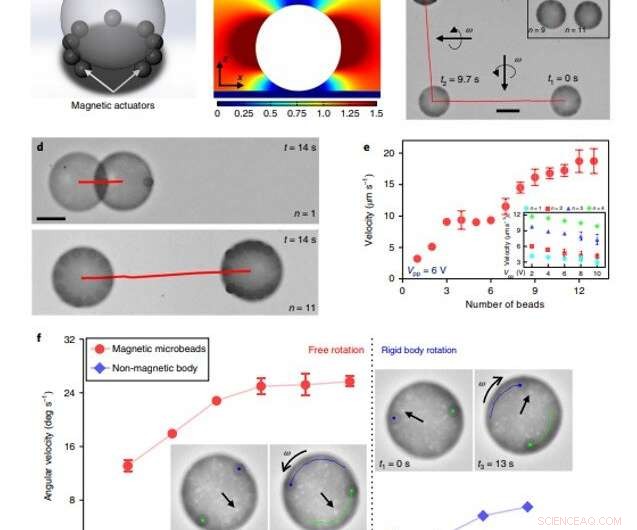 p Montagem reversível de microatuadores magnéticos com corpo não magnético usando forças DEP. (uma, b), Várias micropartículas magnéticas (10 µm de diâmetro) podem ser atraídas perto de um corpo esférico não magnético (60 µm de diâmetro) (a) em direção a regiões com menor intensidade de campo elétrico em torno dos pólos (b). Força do campo elétrico normalizado da barra de cores (E / E0) 2. (c), O microrrobô montado se traduz por meio do movimento de rolamento dos microactuadores sob um campo magnético giratório (ω). O microrrobô pode ser dirigido mudando a direção do campo magnético aplicado. Barra de escala, 50 µm. Inserir, o número de microactuadores magnéticos (n) montados em torno do corpo pode ser ajustado pela captura controlada de microactuadores. (d, e), O número de microatuadores magnéticos, bem como a tensão aplicada (inserção), determinar a velocidade dos microrrobôs montados. Barra de escala em d, 30 µm. (f), Quando um campo magnético rotacional no plano x – y é aplicado, os atuadores giram livremente em torno do corpo não magnético em baixas tensões. Com o aumento da tensão, atuadores se acoplam mecanicamente ao corpo não magnético, o que resulta na rotação do corpo rígido do microrrobô. Barras de erro indicam s.d. de três repetições experimentais. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Montagem reversível de microatuadores magnéticos com corpo não magnético usando forças DEP. (uma, b), Várias micropartículas magnéticas (10 µm de diâmetro) podem ser atraídas perto de um corpo esférico não magnético (60 µm de diâmetro) (a) em direção a regiões com menor intensidade de campo elétrico em torno dos pólos (b). Força do campo elétrico normalizado da barra de cores (E / E0) 2. (c), O microrrobô montado se traduz por meio do movimento de rolamento dos microactuadores sob um campo magnético giratório (ω). O microrrobô pode ser dirigido mudando a direção do campo magnético aplicado. Barra de escala, 50 µm. Inserir, o número de microactuadores magnéticos (n) montados em torno do corpo pode ser ajustado pela captura controlada de microactuadores. (d, e), O número de microatuadores magnéticos, bem como a tensão aplicada (inserção), determinar a velocidade dos microrrobôs montados. Barra de escala em d, 30 µm. (f), Quando um campo magnético rotacional no plano x – y é aplicado, os atuadores giram livremente em torno do corpo não magnético em baixas tensões. Com o aumento da tensão, atuadores se acoplam mecanicamente ao corpo não magnético, o que resulta na rotação do corpo rígido do microrrobô. Barras de erro indicam s.d. de três repetições experimentais. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Os pesquisadores então realizaram a automontagem programável de micro-máquinas móveis com interações físicas codificadas por forma, projetando estruturas de micro-máquinas com geometrias 3-D específicas para gerar gradientes de campo elétrico. A estrutura 3-D atraiu seletivamente microactuadores para locais desejados na própria estrutura da micro-máquina que os cientistas fabricaram usando litografia de dois fótons. Para o primeiro design, os cientistas criaram um microcarro com bolsos nas quatro rodas para gerar forças DEP e guiar a montagem de microactuadores magnéticos nos bolsos. Eles realizaram a automontagem sob demanda do microcarro em segundos após a aplicação de um campo elétrico para rotação livre das rodas magnéticas dentro dos bolsos, como resultado de um campo magnético girando verticalmente. Quando eles ligaram o campo elétrico para um valor alto, os microactuadores magnéticos auto-montados nos locais de encaixe para acoplamento rígido entre a estrutura do micro-rotor e os microactuadores magnéticos. Quando eles aplicaram um campo magnético girando horizontalmente, o conjunto do micromotor girou como um corpo rígido.
p Os cientistas expandiram o protótipo para construir micro-máquinas reconfiguráveis movidas por micromotores autopropelidos. Por esta, eles projetaram micromáquinas montadas com sílica Janus autopropelida (SiO
2 ) micropartículas com uma tampa de ouro (Au). A autopropulsão dependente da frequência e a resposta DEP das micropartículas Janus permitiu-lhes projetar micro-máquinas móveis com organização espacial reconfigurável e cinemática. Esta configuração experimental também demonstrou uma forma de autorreparação.
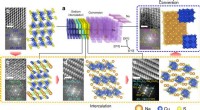
 p À DIREITA:Conjunto reconfigurável codificado por forma de micromáquinas com microactuadores autopropelidos para locomoção sintonizável em frequência. (uma), As micropartículas Janus SiO2 com um cap de Au podem locomover ativamente com base em sDEP em altas frequências e ICEP em baixas frequências. A direção da locomoção é em direção ao cap Au no sDEP e reversa no ICEP. (b), A partícula de Janus experimenta uma força DEP em direção a magnitudes de campo elétrico maiores e menores em altas e baixas frequências, respectivamente. (c – e), Um corpo de microcarro com locais de montagem hemicilíndricos e filetados é projetado para gerar atração seletiva sintonizável em frequência de microactuadores. As partículas de Janus são atraídas em direção à linha equatorial dos hemicilindros em altas frequências e em direção ao local dos filetes em baixas frequências. Força do campo elétrico normalizado da barra de cores (E / E0) 2. A propulsão das partículas de Janus montadas nos sítios hemicilíndricos resulta na rotação do corpo do microcar, enquanto a montagem no local com filete gera tradução linear. f, g, A reconfiguração sob demanda do modo de locomoção é obtida ajustando a frequência e reorganizando o layout espacial da montagem. Barras de escala, 25 µm. ESQUERDA:Montagem hierárquica de várias micro-máquinas por meio de interações DEP codificadas por forma. (a – c), A montagem hierárquica em duas etapas ocorre pela montagem das unidades 1 e 2 da micro-máquina com partículas de Janus autopropelidas (i) e pela montagem lateral da unidade 1 e da unidade 2 (ii). As unidades de Micromachine são projetadas para montagem lateral seletiva, onde a parte inferior das saliências na unidade 2 maior geram campos elétricos baixos que atraem a unidade 1 menor. Barra de cores força do campo elétrico normalizado (E / E0) 2. (d, e), A montagem paralela de micromáquinas móveis mantém o movimento linear das unidades, enquanto a montagem antiparalela resulta em movimento rotacional. Barras de escala, 25 µm. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p À DIREITA:Conjunto reconfigurável codificado por forma de micromáquinas com microactuadores autopropelidos para locomoção sintonizável em frequência. (uma), As micropartículas Janus SiO2 com um cap de Au podem locomover ativamente com base em sDEP em altas frequências e ICEP em baixas frequências. A direção da locomoção é em direção ao cap Au no sDEP e reversa no ICEP. (b), A partícula de Janus experimenta uma força DEP em direção a magnitudes de campo elétrico maiores e menores em altas e baixas frequências, respectivamente. (c – e), Um corpo de microcarro com locais de montagem hemicilíndricos e filetados é projetado para gerar atração seletiva sintonizável em frequência de microactuadores. As partículas de Janus são atraídas em direção à linha equatorial dos hemicilindros em altas frequências e em direção ao local dos filetes em baixas frequências. Força do campo elétrico normalizado da barra de cores (E / E0) 2. A propulsão das partículas de Janus montadas nos sítios hemicilíndricos resulta na rotação do corpo do microcar, enquanto a montagem no local com filete gera tradução linear. f, g, A reconfiguração sob demanda do modo de locomoção é obtida ajustando a frequência e reorganizando o layout espacial da montagem. Barras de escala, 25 µm. ESQUERDA:Montagem hierárquica de várias micro-máquinas por meio de interações DEP codificadas por forma. (a – c), A montagem hierárquica em duas etapas ocorre pela montagem das unidades 1 e 2 da micro-máquina com partículas de Janus autopropelidas (i) e pela montagem lateral da unidade 1 e da unidade 2 (ii). As unidades de Micromachine são projetadas para montagem lateral seletiva, onde a parte inferior das saliências na unidade 2 maior geram campos elétricos baixos que atraem a unidade 1 menor. Barra de cores força do campo elétrico normalizado (E / E0) 2. (d, e), A montagem paralela de micromáquinas móveis mantém o movimento linear das unidades, enquanto a montagem antiparalela resulta em movimento rotacional. Barras de escala, 25 µm. Crédito:Nature Materials, doi:10.1038 / s41563-019-0407-3
p Alapan et al. expandiu as interações DEP codificadas em forma observadas para definir as interações físicas entre as micromáquinas móveis, abrindo o caminho para montagens hierárquicas de várias máquinas. Como prova de princípio, eles projetaram uma montagem hierárquica de dois níveis entre as micromáquinas constituintes.
- No primeiro nível; atuadores autopropelidos montados com duas unidades de microestrutura para formar micro-máquinas móveis que se transladam linearmente
- No segundo nível; a segunda unidade montada lateralmente com a unidade 1 devido à geração de baixos campos elétricos
p Os cientistas ampliaram o projeto apresentado no presente trabalho para a manipulação de micro-atuadores 3-D e a montagem de micro-máquinas com potencial significativo para aplicação em dispositivos lab-on-a-chip para facilitar o transporte contínuo, Ordenação, manipulação digital de micro-objetos e geração de fluxos microfluídicos. Desta maneira, Yunus Alapan e colegas de trabalho projetaram e implementaram a automontagem programável usando a montagem dinâmica direcionada à forma de micro-máquinas de subunidades estruturais e motoras modulares para fornecer controle sem precedentes sobre a dinâmica e funções. O método pode fornecer uma solução para a engenharia de microrrobôs multifuncionais / materiais, uma vez que os cientistas conseguiram incorporar os componentes heterogêneos para detecção, carregamento de cargas e acionamento em conjunto em uma única etapa.
p Para aplicações sem campos elétricos, como aplicações biomédicas in vivo, os cientistas terão como objetivo otimizar e construir sobre a montagem irreversível de micro-componentes para um desempenho otimizado. O trabalho tem potencial significativo para desenvolver multifuncional, micro-máquinas reconfiguráveis e sistemas hierárquicos complexos inspirados na vida em ciência dos materiais para aplicações em microrobóticas, ciência coloidal, medicina e microssistemas autônomos. p © 2019 Science X Network