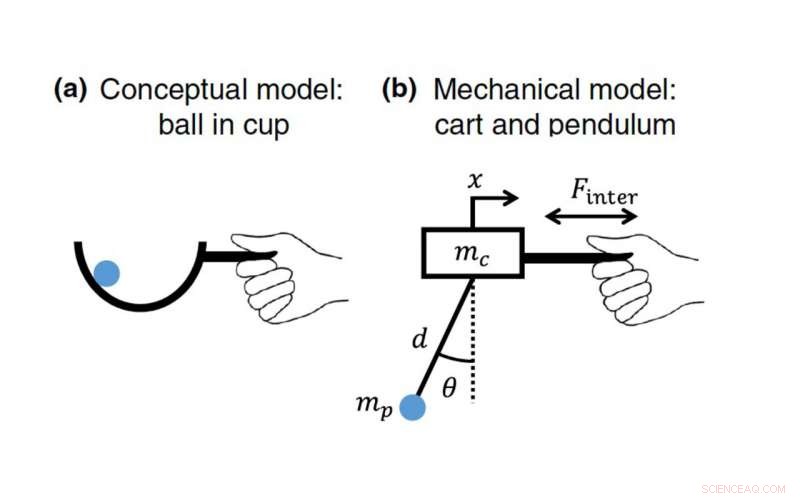
Uma ilustração esquemática do sistema carrinho-pêndulo para simular o manuseio humano de um objeto complexo, como uma xícara de café quente:(a) um modelo conceitual de uma bola rolando dentro de uma xícara circular e (b) um modelo mecânico não linear de um pêndulo preso a um carrinho em movimento, que é matematicamente descrito por um conjunto de equações diferenciais. Crédito:Brent Wallace, Ying-Cheng Lai, Arizona State University
Caminhar tomando café é algo que a maioria de nós faz todos os dias, sem considerar o equilíbrio que isso requer. Na verdade, há muita física impedindo o café de derramar.
O café, um fluido termicamente agitado contido em um copo, tem graus internos de liberdade que interagem com a xícara que, por sua vez, interage com o portador humano.
"Embora os humanos possuam um natural, ou talentoso, capacidade de interagir com objetos complexos, nossa compreensão dessas interações, especialmente em um nível quantitativo, é próximo a zero, "disse o professor da ASU Ying-Cheng Lai, professor de engenharia elétrica da Arizona State University. "Não temos capacidade consciente de analisar as influências de fatores externos, como ruído ou clima, em nossas interações. "
Ainda, compreender esses fatores externos é uma questão fundamental em campos aplicados, como a robótica leve.
"Por exemplo, no design de próteses inteligentes, está se tornando cada vez mais importante construir modos naturais de flexibilidade que imitam o movimento natural dos membros humanos, "disse Brent Wallace, um ex-aluno de graduação de Lai e agora um aluno de doutorado nas Escolas de Engenharia Ira A. Fulton da ASU. "Essas melhorias tornam a prótese mais confortável e natural para o usuário."
De acordo com Lai, é concebível que, em um futuro não muito distante, os robôs serão implantados em várias aplicações de manipulação ou controle de objetos complexos, que requerem o tipo de coordenação e controle de movimento que os humanos fazem muito bem.
Se um robô for projetado para andar com um comprimento de passada relativamente curto, então, variações relativamente grandes na frequência de caminhada são permitidas. Contudo, se uma passada mais longa é desejada, então, a frequência de caminhada deve ser selecionada com cuidado.
Um novo artigo publicado em Revisão Física Aplicada , "Transição síncrona no controle de objetos complexos, "originou-se com Wallace como parte de seu projeto de design sênior em engenharia elétrica, supervisionado por Lai. Wallace recebeu uma bolsa de graduação da NSF e agora é aluno de doutorado na Escola de Elétrica da ASU, Engenharia Informática e Energética.
A pesquisa da equipe ASU expande-se em uma inovação, estudo experimental virtual recentemente conduzido por pesquisadores da Northeastern University, usando o paradigma de segurar a xícara de café e adicionar uma bola rolante, para examinar como os humanos manipulam um objeto complexo. Os participantes giraram deliberadamente o copo de maneira rítmica com a capacidade de variar a força e a frequência para garantir que a bola ficasse contida.
O estudo do Nordeste mostrou que os participantes tendem a selecionar uma estratégia de baixa ou alta frequência - movimento rítmico da xícara - para manusear um objeto complexo.
Uma descoberta notável foi que, quando uma estratégia de baixa frequência foi usada, as oscilações exibem sincronização em fase, mas a sincronização antifásica surge quando uma estratégia de alta frequência foi empregada.
"Uma vez que as frequências baixas e altas são eficazes, é concebível que alguns participantes do experimento virtual tenham mudado de estratégia, "disse Wallace." Isso levanta questões.
"Como ocorre uma transição da sincronização em fase associada a uma estratégia de baixa frequência para a sincronização antifase associada a uma estratégia de alta frequência, ou vice-versa, "perguntou Wallace." No espaço de parâmetros, é a fronteira entre os regimes de sincronização em fase e antifase acentuados, gradual, ou sofisticado? "
A pesquisa da equipe ASU, incitado pela curiosidade de Wallace, estudou a transição entre a sincronização em fase e antifase usando um modelo dinâmico não linear de um pêndulo preso a um carrinho em movimento sujeito a forçamentos periódicos externos.
Os pesquisadores descobriram que, no regime de força fraca, à medida que a frequência de condução externa é variada, a transição é abrupta e ocorre na frequência de ressonância, que pode ser totalmente compreendido usando a teoria de controle de sistemas lineares.
Além deste regime, uma região de transição emerge entre a sincronização em fase e antifase, onde os movimentos do carrinho e do pêndulo não estão sincronizados. Também foi descoberto que há biestabilidade na região de transição e próximo a ela no lado de baixa frequência.
Geral, os resultados indicam que os humanos são capazes de mudar de forma abrupta e eficiente de um atrator síncrono para outro, um mecanismo que pode ser explorado para projetar robôs inteligentes para lidar de forma adaptativa com objetos complexos em um ambiente em mudança.
"É possível que os humanos sejam capazes de usar estratégias tanto em fase quanto em antifase habilmente e mudar de uma estratégia para outra sem problemas, talvez mesmo sem perceber. Os resultados deste estudo podem ser usados para implementar essas habilidades humanas em robôs soft com aplicações em outros campos, como reabilitação e interface cérebro-máquina, "Lai disse.
Adicionalmente, tarefas tão triviais como passar fios na carroceria de um carro em uma linha de montagem - que os humanos realizam com facilidade - ainda escapam às máquinas mais avançadas.
"Uma compreensão quantitativa sistemática de como os humanos interagem dinamicamente com seu ambiente mudará para sempre a forma como projetamos nosso mundo, e pode revolucionar o design de próteses inteligentes e inaugurar uma nova era de fabricação e automação, "disse Wallace." Ao imitar os comportamentos dinamicamente favoráveis adotados por humanos no manuseio de objetos complexos, seremos capazes de automatizar processos antes considerados impossíveis. "