 Veículo terrestre não tripulado triturador Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p O Crusher fez sua estreia no verdadeiro estilo de um caminhão-monstro:os dois protótipos entraram em um prédio da Carnegie Mellon University com música estridente e luzes piscando. Um Crusher ficou parado enquanto sua contraparte começou a rolar e esmagar pilhas de carros que teriam a maioria dos monster trucks dando ré com a cauda entre as pernas. O Crusher não é um caminhão típico. Ele pode passar por cima de uma parede vertical de 1,2 m enquanto carrega 8, 000 libras de carga.
p Crusher é um veículo terrestre não tripulado ( UGV ) financiado pela DARPA e projetado pelo Centro Nacional de Engenharia Robótica da Carnegie Mellon ( NREC ) O impulso do projeto Crusher - que se baseia em outro UGV projetado pelo NREC chamado Spinner (às vezes é chamado de Crusher Spinner versão 2.0 ) - é basicamente o impulso de toda a pesquisa e desenvolvimento financiados pelos militares no mundo UGV agora:capacidades de percepção aumentadas, autonomia e robustez. O Exército dos EUA gostaria de poucas coisas mais do que um não tripulado, tanque silencioso que pode transportar carga útil ilimitada, defenda-se contra o inimigo e acelere sem restrições em terreno que teria o Hummer enrolado em posição fetal.
Veículo terrestre não tripulado triturador Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p O Crusher fez sua estreia no verdadeiro estilo de um caminhão-monstro:os dois protótipos entraram em um prédio da Carnegie Mellon University com música estridente e luzes piscando. Um Crusher ficou parado enquanto sua contraparte começou a rolar e esmagar pilhas de carros que teriam a maioria dos monster trucks dando ré com a cauda entre as pernas. O Crusher não é um caminhão típico. Ele pode passar por cima de uma parede vertical de 1,2 m enquanto carrega 8, 000 libras de carga.
p Crusher é um veículo terrestre não tripulado ( UGV ) financiado pela DARPA e projetado pelo Centro Nacional de Engenharia Robótica da Carnegie Mellon ( NREC ) O impulso do projeto Crusher - que se baseia em outro UGV projetado pelo NREC chamado Spinner (às vezes é chamado de Crusher Spinner versão 2.0 ) - é basicamente o impulso de toda a pesquisa e desenvolvimento financiados pelos militares no mundo UGV agora:capacidades de percepção aumentadas, autonomia e robustez. O Exército dos EUA gostaria de poucas coisas mais do que um não tripulado, tanque silencioso que pode transportar carga útil ilimitada, defenda-se contra o inimigo e acelere sem restrições em terreno que teria o Hummer enrolado em posição fetal.
p O Crusher provavelmente nunca verá uma produção em massa. O custo seria muito alto (os designers nem mesmo citam um número). Ele é projetado como um protótipo funcional para testar várias tecnologias que o NREC está desenvolvendo como parte de um programa chamado UPI . p UPI significa você Veículo de combate terrestre tripulado P erceptOR (off-road) eu integração, um bocado financiado pela DARPA que abrange experimentos para "avaliar as capacidades de grande escala, veículos terrestres não tripulados (UGV) operando de forma autônoma em uma ampla gama de complexos, terrenos off-road "[ref]. O triturador de 6,5 toneladas pesa quase 30 por cento menos do que o Spinner e pode transportar mais carga. A única coisa que o NREC deixou de fora da atualização do Spinner é a capacidade de continuar trabalhando se for virado de cabeça para baixo . Nenhuma palavra sobre por que essa função legal desapareceu, embora a lógica sugerisse que era tornar possíveis algumas das outras funções atualizadas de Crusher ou cortar uma capacidade de alto custo que pode não ser crucial para a missão principal da UPI. p Então, o que o Crusher pode fazer?
 Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica
Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica
 Protótipos de britador Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Existem três áreas de foco principais no desenvolvimento do Crusher:
Protótipos de britador Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Existem três áreas de foco principais no desenvolvimento do Crusher:
 Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Para mantê-lo se movendo sobre obstáculos e terrenos geralmente hostis, Crusher tem seis rodas, sistema de tração nas quatro rodas alimentado por um híbrido diesel-elétrico configuração que permite uma operação quase silenciosa - uma característica útil no trabalho de reconhecimento. A 78 cavalos de potência, motor turbo-diesel atua como um gerador no sistema, produzindo 58 quilowatts (kW) contínuos de energia para carregar 300 volts do Crusher, 18,7 kW, bateria de íon de lítio. As baterias, por sua vez, acionam seis motores elétricos de 210 kW, um situado em cada um dos seis cubos das rodas. Cada motor produz 282 cavalos de potência. Como a maioria dos sistemas elétricos híbridos, O Crusher usa a frenagem regenerativa para devolver alguma energia às baterias cada vez que ela reduz a velocidade (consulte Como funcionam os carros híbridos para saber mais sobre a frenagem regenerativa). O veículo pode funcionar somente com bateria silenciosa por 2 a 10 milhas (3 a 16 km), dependendo da velocidade e da carga de carga.
p Uma vez que cada roda é movida de forma independente, se um ou dois morrem, O Crusher pode continuar. Ele precisa de apenas quatro das seis rodas para manter suas capacidades. E se precisar repentinamente de uma reviravolta - digamos, cercado em três lados por barreiras intransponíveis - ele pode usar seu habilidade de direção deslizante , um raio de giro de zero, para virar a cara rapidamente sem nenhum espaço de manobra.
p Para caber sob obstáculos baixos, enfrente terreno rochoso ou melhor se esconda do inimigo, A britadeira tem altura de deslocamento ajustável de zero a 30 polegadas (76 cm). Além do ajuste de altura, A suspensão do Crusher pode viajar 30 polegadas completas para absorver o choque, e possui rigidez ajustável para diferentes condições de solo. Conseguimos localizar uma visão interna do Spinner, Predecessor do Crusher - lembre-se de que o Crusher é uma versão atualizada do Spinner 1.0:
Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Para mantê-lo se movendo sobre obstáculos e terrenos geralmente hostis, Crusher tem seis rodas, sistema de tração nas quatro rodas alimentado por um híbrido diesel-elétrico configuração que permite uma operação quase silenciosa - uma característica útil no trabalho de reconhecimento. A 78 cavalos de potência, motor turbo-diesel atua como um gerador no sistema, produzindo 58 quilowatts (kW) contínuos de energia para carregar 300 volts do Crusher, 18,7 kW, bateria de íon de lítio. As baterias, por sua vez, acionam seis motores elétricos de 210 kW, um situado em cada um dos seis cubos das rodas. Cada motor produz 282 cavalos de potência. Como a maioria dos sistemas elétricos híbridos, O Crusher usa a frenagem regenerativa para devolver alguma energia às baterias cada vez que ela reduz a velocidade (consulte Como funcionam os carros híbridos para saber mais sobre a frenagem regenerativa). O veículo pode funcionar somente com bateria silenciosa por 2 a 10 milhas (3 a 16 km), dependendo da velocidade e da carga de carga.
p Uma vez que cada roda é movida de forma independente, se um ou dois morrem, O Crusher pode continuar. Ele precisa de apenas quatro das seis rodas para manter suas capacidades. E se precisar repentinamente de uma reviravolta - digamos, cercado em três lados por barreiras intransponíveis - ele pode usar seu habilidade de direção deslizante , um raio de giro de zero, para virar a cara rapidamente sem nenhum espaço de manobra.
p Para caber sob obstáculos baixos, enfrente terreno rochoso ou melhor se esconda do inimigo, A britadeira tem altura de deslocamento ajustável de zero a 30 polegadas (76 cm). Além do ajuste de altura, A suspensão do Crusher pode viajar 30 polegadas completas para absorver o choque, e possui rigidez ajustável para diferentes condições de solo. Conseguimos localizar uma visão interna do Spinner, Predecessor do Crusher - lembre-se de que o Crusher é uma versão atualizada do Spinner 1.0:
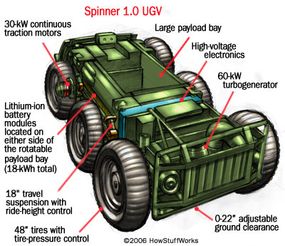 O Crusher apresenta atualizações no ajuste da altura do passeio, viagem de suspensão, peso do veículo e capacidade de carga. p A estrutura poderosa do Crusher, A configuração com tração nas seis rodas e recursos de suspensão extremas permitem que o UGV se desloque em altas velocidades, atualmente até 26 mph (42 kph), em terreno difícil, enfrentando obstáculos como valas, pedregulhos, inclinações íngremes e barreiras verticais de até 4 pés, tudo sem perder o ritmo.
p Robustez, poder e silêncio tornam o Crusher uma ferramenta de patrulha ideal, mas é principalmente o sistema de autonomia da UGV que a DARPA desembolsou até agora $ 35 milhões para desenvolver. O NREC não divulgou muitas informações detalhadas sobre o sistema UPI, mas diz que "esta tecnologia espalha habilidades de detecção por todo o veículo para ajudar a equilibrar sua percepção e também apoiar as áreas do veículo que podem ser menos adeptas a detectar o ambiente. O software [de detecção] também permitirá que Crusher 'aprenda' e aplique as informações coletadas anteriormente a novos obstáculos. "
p Sabemos que o hardware de percepção consiste principalmente em LADAR (detecção e alcance de laser) unidades e matrizes de câmeras . Uma unidade LADAR envia um feixe de laser para escanear uma área e mede quanto tempo leva para o feixe ser refletido de volta para o sensor de laser da unidade. O Crusher possui oito dessas unidades - quatro examinando o ambiente horizontalmente e quatro examinando verticalmente. Ele usa seis pares de câmeras de visão estéreo para percepção de profundidade e quatro câmeras coloridas para aplicar um pixel colorido a cada ponto de distância determinado pelo sensor LADAR.
O Crusher apresenta atualizações no ajuste da altura do passeio, viagem de suspensão, peso do veículo e capacidade de carga. p A estrutura poderosa do Crusher, A configuração com tração nas seis rodas e recursos de suspensão extremas permitem que o UGV se desloque em altas velocidades, atualmente até 26 mph (42 kph), em terreno difícil, enfrentando obstáculos como valas, pedregulhos, inclinações íngremes e barreiras verticais de até 4 pés, tudo sem perder o ritmo.
p Robustez, poder e silêncio tornam o Crusher uma ferramenta de patrulha ideal, mas é principalmente o sistema de autonomia da UGV que a DARPA desembolsou até agora $ 35 milhões para desenvolver. O NREC não divulgou muitas informações detalhadas sobre o sistema UPI, mas diz que "esta tecnologia espalha habilidades de detecção por todo o veículo para ajudar a equilibrar sua percepção e também apoiar as áreas do veículo que podem ser menos adeptas a detectar o ambiente. O software [de detecção] também permitirá que Crusher 'aprenda' e aplique as informações coletadas anteriormente a novos obstáculos. "
p Sabemos que o hardware de percepção consiste principalmente em LADAR (detecção e alcance de laser) unidades e matrizes de câmeras . Uma unidade LADAR envia um feixe de laser para escanear uma área e mede quanto tempo leva para o feixe ser refletido de volta para o sensor de laser da unidade. O Crusher possui oito dessas unidades - quatro examinando o ambiente horizontalmente e quatro examinando verticalmente. Ele usa seis pares de câmeras de visão estéreo para percepção de profundidade e quatro câmeras coloridas para aplicar um pixel colorido a cada ponto de distância determinado pelo sensor LADAR.
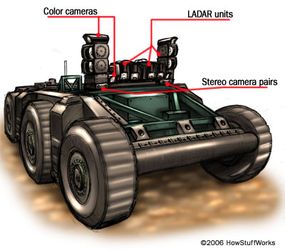 Versão inicial do sistema de percepção de Crusher p A encarnação mais recente do Crusher apresenta um mastro telescópico para coletar dados de um ponto de vista superior. O mastro pode incorporar partes do LADAR e do conjunto da câmera visto acima, ou pode simplesmente adicionar um conjunto adicional de sensores ao sistema de percepção.
Versão inicial do sistema de percepção de Crusher p A encarnação mais recente do Crusher apresenta um mastro telescópico para coletar dados de um ponto de vista superior. O mastro pode incorporar partes do LADAR e do conjunto da câmera visto acima, ou pode simplesmente adicionar um conjunto adicional de sensores ao sistema de percepção.
 Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Com todos os dados do LADAR e da câmera combinados, Crusher's CPU a bordo cria uma imagem 3D da paisagem em que Crusher está viajando. A CPU é um Pentium 3 de 700 MHz que controla as atividades mecânicas do Crusher e executa o software de navegação que lida com o processamento de dados do sensor. Um unidade de medição inercial ( IMU ) detecta a altitude de Crusher, posição e direção do movimento usando uma combinação de acelerômetros (sensores de inclinação) e giroscópios, portanto, Crusher está sempre ciente de seu próprio movimento e posição em relação à paisagem. O UGV também possui um receptor GPS integrado e banco de dados GPS baseado em computador que inclui dados de terreno pré-programados.
p Até aqui, experimentos de campo mostraram que Crusher está a caminho da verdadeira autonomia. Em teste, O Crusher mudou de um ponto de referência do GPS para outro com um intervalo de mais de 1 km (0,6 milhas) sem qualquer controle externo. Usando seus sistemas de percepção e navegação, O triturador pode reagir aos obstáculos rapidamente - não é necessário que um operador diga o que fazer quando atingir algo. Pode subir uma inclinação superior a 40 graus, passe direto por um degrau de 4 pés e atravesse uma vala de 80 polegadas usando seus próprios recursos de tomada de decisão. A capacidade de cruzar valas é especialmente interessante - os pneus do Crusher são montados de forma que possam cair para apoiar o veículo enquanto ele atravessa uma lacuna.
Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Com todos os dados do LADAR e da câmera combinados, Crusher's CPU a bordo cria uma imagem 3D da paisagem em que Crusher está viajando. A CPU é um Pentium 3 de 700 MHz que controla as atividades mecânicas do Crusher e executa o software de navegação que lida com o processamento de dados do sensor. Um unidade de medição inercial ( IMU ) detecta a altitude de Crusher, posição e direção do movimento usando uma combinação de acelerômetros (sensores de inclinação) e giroscópios, portanto, Crusher está sempre ciente de seu próprio movimento e posição em relação à paisagem. O UGV também possui um receptor GPS integrado e banco de dados GPS baseado em computador que inclui dados de terreno pré-programados.
p Até aqui, experimentos de campo mostraram que Crusher está a caminho da verdadeira autonomia. Em teste, O Crusher mudou de um ponto de referência do GPS para outro com um intervalo de mais de 1 km (0,6 milhas) sem qualquer controle externo. Usando seus sistemas de percepção e navegação, O triturador pode reagir aos obstáculos rapidamente - não é necessário que um operador diga o que fazer quando atingir algo. Pode subir uma inclinação superior a 40 graus, passe direto por um degrau de 4 pés e atravesse uma vala de 80 polegadas usando seus próprios recursos de tomada de decisão. A capacidade de cruzar valas é especialmente interessante - os pneus do Crusher são montados de forma que possam cair para apoiar o veículo enquanto ele atravessa uma lacuna.
 Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Especificações do britador :
Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Especificações do britador :
 Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Em 2006, os militares dos EUA implantaram aproximadamente 4, 000 robôs de batalha para o serviço ativo. Os militares usam esses robôs principalmente para "farejar" bombas e limpar prédios e outras estruturas fechadas. Do exército Future Combat Systems ( FCS ) programa pretende gastar cerca de US $ 300 milhões para financiar atualizações para expandir as funções dos robôs do campo de batalha. O FCS busca mulas robóticas que podem transportar carga ao lado de tropas em terreno irregular e veículos não tripulados muito maiores que podem operar sem intervenção humana para explorar áreas e patrulhar fronteiras, enviando dados cruciais de volta para as tropas. Se forem grandes, veículos autônomos também podem transportar cargas úteis enormes em terrenos difíceis sem perder velocidade, isso seria um bônus adicional. Triturador ou algo parecido seria ideal nas últimas funções.
p O próprio Crusher provavelmente não será implantado. É principalmente um projeto de pesquisa e estará em teste e experimentação até 2008. Naquela época, o NREC passará a tecnologia do Crusher para a DARPA para que possa ser aplicada a projetos relacionados, a maioria dos quais está sob o domínio do Sistema de Combate do Futuro. O FCS está executando programas de desenvolvimento como o Armed Reconnaissance Vehicle (ARV), que visa realizar um sistema totalmente autônomo, veículo pronto para a batalha para missões de reconhecimento; e o Sistema de Navegação Autônomo (ANS), um programa abrangente para desenvolver capacidades de autonomia de plataforma comum para uma ampla gama de robôs militares. O objetivo geral do FCS é a integração perfeita de veículos tripulados e não tripulados, solo e ar, em uma estrutura que pode ser gerenciada por meio de um único, sistema de controle semelhante a uma web.
Foto cedida por Carnegie Mellon, Centro Nacional de Engenharia Robótica p Em 2006, os militares dos EUA implantaram aproximadamente 4, 000 robôs de batalha para o serviço ativo. Os militares usam esses robôs principalmente para "farejar" bombas e limpar prédios e outras estruturas fechadas. Do exército Future Combat Systems ( FCS ) programa pretende gastar cerca de US $ 300 milhões para financiar atualizações para expandir as funções dos robôs do campo de batalha. O FCS busca mulas robóticas que podem transportar carga ao lado de tropas em terreno irregular e veículos não tripulados muito maiores que podem operar sem intervenção humana para explorar áreas e patrulhar fronteiras, enviando dados cruciais de volta para as tropas. Se forem grandes, veículos autônomos também podem transportar cargas úteis enormes em terrenos difíceis sem perder velocidade, isso seria um bônus adicional. Triturador ou algo parecido seria ideal nas últimas funções.
p O próprio Crusher provavelmente não será implantado. É principalmente um projeto de pesquisa e estará em teste e experimentação até 2008. Naquela época, o NREC passará a tecnologia do Crusher para a DARPA para que possa ser aplicada a projetos relacionados, a maioria dos quais está sob o domínio do Sistema de Combate do Futuro. O FCS está executando programas de desenvolvimento como o Armed Reconnaissance Vehicle (ARV), que visa realizar um sistema totalmente autônomo, veículo pronto para a batalha para missões de reconhecimento; e o Sistema de Navegação Autônomo (ANS), um programa abrangente para desenvolver capacidades de autonomia de plataforma comum para uma ampla gama de robôs militares. O objetivo geral do FCS é a integração perfeita de veículos tripulados e não tripulados, solo e ar, em uma estrutura que pode ser gerenciada por meio de um único, sistema de controle semelhante a uma web.
p Por meio do FCS, podemos ver veículos semelhantes aos do Crusher apoiando as tropas em operações de batalha em cinco a dez anos. Eles provavelmente começarão em funções de reconhecimento e, em seguida, farão a transição para o combate, apoiar as tropas em vez de substituí-las. Mas a tecnologia de autonomia de ponta do Crusher não é específica para fins militares. O NREC prevê - e tem em andamento - projetos de pesquisa que utilizem os sistemas desenvolvidos para o Crusher em aplicações civis. Em uma década, pudemos ver veículos autônomos realizando tarefas arriscadas em áreas como agricultura, mineração e construção, em última análise, transferindo parte do perigo enfrentado pelos humanos nesses campos para contrapartes robóticas substituíveis que não sentem dor. p Para obter mais informações sobre o Crusher, UGVs e tópicos relacionados, confira os links na próxima página.














